

Motorlar Dönmeden Önce: FPV’ye Teorik Bakış
Son yıllarda FPV (First Person View – Birinci Şahıs Görüşlü) drone sistemleri, yalnızca hobi dünyasında değil, aynı zamanda savunma sanayiinde de büyük bir etki yarattı. Başlangıçta yarışlar ve eğlence amaçlı kullanılan bu sistemler, artık savaş alanlarında keşif, hedef tespiti ve hatta kamikaze görevlerinde aktif olarak kullanılıyor. Özellikle Ukrayna-Rusya Savaşı gibi modern çatışmalarda, düşük maliyetli ve etkili FPV dron’ların asimetrik savaşta nasıl fark yaratabileceği gözler önüne serildi.
Bu eğitim içeriğinde, bir FPV dron’u oluşturan temel parçaların ne işe yaradığını, birbirleriyle nasıl çalıştıklarını ve sistemin genel mantığını teorik bir bakış açısıyla inceleyeceğiz.
FPV Drone Nedir?
FPV, yani First Person View (Birinci Şahıs Görüşü), pilotun drone üzerindeki kameradan gelen görüntüyü gerçek zamanlı olarak görmesini sağlayan bir uçuş sistemidir. Bu sayede pilot, dron’u sanki onun kokpitindeymiş gibi kontrol edebilir.
FPV sistemlerinde genelde görüş açısı tamamen kameranın baktığı yönle sınırlıdır. Bu durum, geniş görüş açısı yerine hedef odaklı ve yüksek hassasiyetli bir kontrol sağlar. Bu sınırlı görüş alanı dezavantaj gibi görünse de, özellikle dar alanlar, yüksek hız gerektiren manevralar ve hedefe kilitli operasyonlar için FPV sistemi büyük avantaj sağlar. Bu nedenle FPV dron’lar yarış ve akrobasi uçuşlarında yaygınlaştığı gibi, günümüzde keşif ve askeri görevlerde de aktif biçimde kullanılmaktadır.
FPV dron’lar ilk olarak hobi ve yarış dünyasında kendine yer buldu. 2010’lu yılların ortalarından itibaren, özellikle YouTube ve sosyal medya sayesinde FPV uçuş videoları popülerleşti. Bu sistemler başlangıçta yüksek manevra kabiliyeti ve eğlenceli sürüş deneyimi sunmak amacıyla geliştirildi. Akrobatik hareketler, dar alanlarda yüksek hızla uçuş gibi yetenekleri sayesinde birçok drone meraklısı bu dünyaya adım attı.Ancak bu sistemler, zamanla yalnızca bir hobi aracı olmaktan çıkıp taktiğe dayalı profesyonel kullanımların da radarına girdi.
FPV dron’ların askeri alandaki en büyük sıçraması, Ukrayna-Rusya Savaşı ile yaşandı. Özellikle 2022 sonrası dönemde, Ukrayna'nın sınırlı kaynaklarla yüksek etki yaratmak için başvurduğu en yaratıcı çözümlerden biri kamikaze FPV drone sistemleriydi.
Basitçe modifiye edilen FPV dron’lar, üzerine el yapımı patlayıcılar veya tanksavar mühimmatlar yerleştirilerek düşman zırhlı araçlarına, mevzilerine ve hatta bireysel hedeflere karşı kullanıldı. Düşük maliyetli, kolay temin edilebilir ve yüksek isabet oranına sahip bu sistemler, modern savaşın doğasını değiştiren asimetrik savaş araçları hâline geldi.
Bu teknoloji, merkezi sistemlere bağımlı olmayan, bireysel veya küçük birliklerce hızlıca üretilebilen ve kontrol edilebilen yeni bir saldırı konsepti sundu. Savaşın başlarında birkaç yüz dolarlık FPV sistemlerinin milyon dolarlık askeri araçları imha etmesi, bu dönüşümün sembolü oldu.

FPV Drone hangi parçalardan oluşur?
🔩 Frame
Dron’un iskelet yapısıdır. Tüm elektronik bileşenleri üzerinde taşır ve uçuş sırasında yapısal bütünlüğü sağlar.
🧠 Flight Controller (Uçuş Kontrol Kartı)
Dron’un beynidir. Sensör verilerini işler, pilot komutlarını motorlara aktarır ve stabil uçuşu sağlar.
⚡ ESC (Electronic Speed Controller/ Elektronik Hız Kontrolcüsü)
Motorların hızını kontrol eden elektronik birimdir. Uçuş Kontrol Kartından gelen sinyale göre motorlara ne kadar güç gideceğini belirler.
🌀 Motorlar
Dron’u havalandıran ve yönlendiren itki kaynaklarıdır. Dönme yönleri ve hızları uçuşun dengesini belirler.
🪶 Pervaneler
Motorlara takılarak itki üretirler. Havanın itilmesiyle dron’un yükselmesini, yönlenmesini ve hareket etmesini sağlarlar.
📡 VTX (Video Transmitter/Video Vericisi)
Kameradan gelen görüntüyü FPV gözlüğe veya ekrana ileten video vericisidir. Canlı uçuş görüntüsü sağlar.
📥 RX (Receiver/Alıcı)
Kumandadan gelen sinyalleri alır ve uçuş kontrolcüsüne aktarır. Pilotun yön, gaz, dönüş gibi komutlarını iletir.
🎥 Kamera
Dron’un gözüdür. FPV sistemin temelidir ve pilotun uçuş esnasında yönünü belirlemesini sağlar.
📶 Antenler
Hem görüntü aktarımı (VTX) hem de kontrol sinyali (RX) için kullanılır. İletişim kalitesini ve menzili doğrudan etkiler.
🔋 Batarya
Dron’un tüm sistemlerine güç sağlar. Uçuş süresi ve güç çıkışı büyük ölçüde bataryaya bağlıdır.
📍 GPS
Uçuş konumunu belirlemeye yarar. Geri dönüş, pozisyon sabitleme ve telemetri gibi işlevlerde kullanılır.
Yan Ekipmanlar
🎮 Kumanda (Transmitter)
Pilotun dron'u yönlendirmek için kullandığı ana kontrol cihazıdır. Gaz, yön, roll ve pitch komutlarını RX üzerinden dron’a iletir.
🥽 FPV Gözlük
Kameradan gelen canlı görüntüyü gerçek zamanlı olarak gösterir. Pilotun uçuş sırasında dron’un gözünden görmesini sağlar.
🔌 Batarya Şarj Aleti
Li-Po veya Li-ion bataryaları güvenli ve kontrollü şekilde şarj etmek için kullanılır. Hücre dengesi ve voltaj takibi açısından kritiktir.
🧰 Alet Çantasında Neler Olmalı?
Dron’u sahada onarmak, ayarlamak veya parça değiştirmek için gerekli temel araç-gereçlerin bulunduğu çantadır. İçeriğinde genellikle şunlar bulunmalıdır:
Yedek pervaneler
Tornavida ve alyan seti
Lehim teli ve küçük lehimci
Cımbız ve pense
Çift taraflı bant ve zip bağları
Voltaj ölçer veya küçük multimetre
Yedek anten veya kablolar
Elektrik bandı veya ısıya dayanıklı bant
PARÇALAR
Frame (Gövde – Şase)
Frame, bir FPV dron’un iskeletini oluşturan temel yapıdır. Tüm elektronik parçalar motorlar, flight controller (FC), ESC, kamera, VTX, antenler ve batarya gibi komponentler bu yapı üzerine monte edilir. Frame’in sağlamlığı, ağırlığı, esnekliği ve tasarımı, doğrudan dron’un uçuş performansını, dayanıklılığını ve hatta görevini etkiler.
🛠️ Malzeme Yapısı
FPV drone frame’leri genellikle karbon fiber malzemeden üretilir. Çünkü karbon fiber:
Hafif,
Son derece dayanıklı,
Elektriksel olarak yalıtkan,
Ve yüksek darbe direncine sahiptir.
Bu özellikler, özellikle yarışlarda ve çarpışma riskinin yüksek olduğu görevlerde büyük avantaj sağlar. Daha düşük bütçeli veya eğitim amaçlı dron’larda plastik ya da alüminyum alaşımlı frame’ler de tercih edilebilir; ancak bu malzemeler genellikle ya daha ağırdır ya da yeterince sağlam değildir.
📐 Frame Boyutları (Inch)
Frame'ler genellikle motorlar arası çap ölçüsüne göre sınıflandırılır:
3 inch, 5 inch, 7 inch, hatta 10 inch gibi.
3 inch ve altı → Cinewhoop ve iç mekan kullanımı
5 inch → Freestyle ve yarış dron’ları için en popüler boy
7 inch ve üzeri → Long-range ve ağır taşıyıcı sistemler için tercih edilir
Boyut arttıkça daha büyük pervaneler kullanılabilir, bu da daha fazla itki ve daha uzun uçuş süresi anlamına gelir. Ancak beraberinde ağırlık ve kontrol zorluğu da artar.
🔩 Frame Tasarım Tipleri
Frame’ler birkaç farklı konfigürasyonda tasarlanır. En yaygın olanlar:
True-X: Dört kol simetrik şekilde yerleşmiştir. Freestyle uçuşlar için idealdir.
Stretch-X: Kol uzunlukları önden arkaya biraz daha fazladır, yarış dron’ları için tercih edilir.
Deadcat: Ön kollar yana daha yataydır; kamera görüş açısında pervane çıkmasını engeller.
H-Frame: Daha büyük elektronikler için uygundur, genellikle sinema dron’larda kullanılır.

True-X Frame

Stretch-X Frame

Deadcat Frame

H-Frame
🔧 Montaj ve Uyumluluk
Frame seçerken dikkat edilmesi gereken diğer unsurlar:
Montaj delik ölçüleri: FC, ESC ve VTX gibi bileşenlerin frame’e oturması için delik çapları önemlidir (örneğin: 30.5x30.5 mm, 20x20 mm).
Batarya montaj yeri: Üstte mi altta mı olacak? Bu, ağırlık merkezini ve uçuş karakterini etkiler.
Kamera yuvası genişliği: Micro, mini, full-size FPV kameralar için uygunluk.
Kol değiştirilebilirliği: Çarpma sonrası sadece bir kolu değiştirebilmek bakım kolaylığı sağlar.
🎯 Göreve Göre Frame Seçimi
Freestyle: Dayanıklı, orta boyutlu, True-X yapıda frame’ler.
Yarış: Hafif ve ince, Stretch-X ya da Hybrid yapıda, hızlı tepki veren frame’ler.
Kamikaze veya askeri görev: Modüler yapıya sahip, uzun menzil taşıyabilecek sağlam frame’ler.
Cinewhoop: Koruyucu kanal (duct) içeren küçük ve sessiz frame yapıları.
Long-range: 7 inch ve üstü, GPS ve büyük batarya destekleyen yapı.
🔚 Sonuç
Frame, bir FPV dron’’un tüm karakterini belirleyen ana iskelettir. Malzemesi, boyutu ve tasarımı, sadece dayanıklılığı değil, aynı zamanda uçuş tarzını, görev türünü ve bileşen yerleşimini de belirler. Bu nedenle frame seçimi, rastgele değil, sistemin tamamı düşünülerek yapılmalıdır. Çünkü sağlam bir uçuş, sağlam bir iskeletle başlar.
Flight Controller (Uçuş Kontrolcüsü)
Flight controller, yani uçuş kontrolcüsü, FPV dron’un tüm uçuş davranışlarını yöneten, adeta sistemin beyni görevini üstlenen elektronik birimdir. Sensörlerden veri toplar, pilot komutlarını işler, motorlara iletir ve uçuşun dengeli ve kontrollü gerçekleşmesini sağlar.
📦 Ne İşe Yarar?
Flight controller’ın temel işlevi, kumandadan gelen sinyalleri alıp motorlara nasıl tepki verileceğini belirlemektir. Aynı zamanda dron’un yönelimini, dengesini, hızını ve konumunu kontrol altında tutar. Tüm bu işlevler, FC üzerinde bulunan sensörler ve yazılımlar sayesinde gerçekleşir.
🧭 FC Üzerindeki Temel Sensörler
Gyroscope (Jiroskop): Dron’un açısal hareketlerini algılar (yaw, pitch, roll).
Accelerometer (İvmeölçer): Hangi yönde ne kadar hızlandığını ölçer.
Barometer (Opsiyonel): Yükseklik bilgisi sağlar.
Magnetometer (Opsiyonel): Pusula görevi görerek yön tayininde kullanılır.
🖥️ FC Yazılımları
Flight controller’lar, içindeki donanımı yöneten açık kaynaklı veya özel yazılımlarla çalışır. En yaygın kullanılan yazılımlar şunlardır:
Betaflight: Freestyle ve yarış odaklı, manuel kontrol odaklı sistemler için ideal.
INAV: GPS tabanlı görevler ve sabit kanatlı sistemler için daha uygun.
ArduPilot (ArduFC): Otonom uçuş, görev planlama, uzun menzil ve askeri uygulamalar için gelişmiş yeteneklere sahip, modüler yapıdadır.
Seçilen yazılım, FC’nin ne kadar özelleştirilebileceğini ve ne tür görevlerde kullanılabileceğini belirler.
🔩 Montaj Şekli ve Format
FC’ler genellikle kare biçiminde kartlardır ve frame’in orta kısmına, 20x20 mm veya 30.5x30.5 mm ölçülerindeki deliklere oturtularak monte edilir. Bazı sistemlerde FC ve ESC birlikte tek bir kart olarak üretilir (AIO – All-in-One), bazı sistemlerde ise ayrı katmanlarda yer alır.
⚙️ Özelleştirilebilirlik
Flight controller’lar PID ayarları, filtreleme, sensör kalibrasyonu, uçuş modları (Angle, Horizon, Acro), throttle eğrileri ve daha birçok parametreyle detaylı şekilde yapılandırılabilir. Bu da onları yalnızca bir kontrol aracı değil, aynı zamanda ince ayarlı bir mühendislik platformu hâline getirir.
🧬 Flight Controller Türleri (İşlemci Tipleri)
Flight controller’lar, üzerinde yer alan mikrodenetleyicilere göre sınıflandırılır. Bu mikrodenetleyiciler, FC’nin işlem gücünü, desteklediği sensör sayısını, yazılım özelliklerini ve genel sistem performansını doğrudan etkiler. Aşağıda, yaygın FC türleri ve aralarındaki temel farklar yer alıyor:
🧠 F1 Serisi (Artık kullanılmıyor)
İlk nesil FC işlemcilerindendir. Yavaş, düşük bellekli ve modern yazılımlarla uyumsuzdur. Artık aktif olarak tercih edilmez.
🧠 F3 Serisi (Tarihe karıştı)
F1’e göre daha güçlüydü ancak 2020 sonrası Betaflight gibi yazılımların F3 desteğini bırakmasıyla rafa kalktı.
🧠 F4 Serisi (Örn: F405)
Hâlen yaygın olarak kullanılan, orta seviye performans sunan işlemcilerdir. PID döngüleri hızlıdır, Betaflight gibi yazılımları rahatça çalıştırabilirler. Genellikle:
1 MB flash bellek
3-4 UART portu (cihaz bağlantı noktası)
OSD, barometre gibi özelliklerle birlikte gelir
Kısıtlama: Donanımsal olarak inverter eksikliği nedeniyle bazı protokoller için yazılımsal çözümler gerekir (örneğin SBUS).
🧠 F7 Serisi (Örn: F722)
F4’ten çok daha güçlüdür. Daha fazla sensör ve özellik destekler:
Çift çekirdekli işlemci
Daha fazla UART (6-8 port)
Yüksek frekansta PID döngüsü (8k/8k)
OSD, barometre, blackbox ve daha fazlası
En büyük avantajı, donanımsal invertere sahip olmasıdır, yani her türlü alıcıyla (SBUS, CRSF vb.) doğrudan uyumludur.
🧠 H7 Serisi
F7’nin de ötesinde, yüksek uçuş kontrol frekansı ve gelişmiş otonom görevler için uygundur. Genellikle ArduPilot ve INAV gibi karmaşık yazılımlarda, sabit kanatlı veya uzun menzilli sistemlerde tercih edilir. Profesyonel kullanım alanına girer.
📌 Hangi FC'yi Seçmeli?
Yeni başlıyorsan: F405 içeren bir FC yeterli performans sunar ve ekonomiktir.
Gelişmiş GPS, OSD, çoklu sensör kullanacaksan: F722 daha esnektir ve sorun çıkartmaz.
Otonom görevler ve sabit kanatlı platformlar: F7 veya H7 içeren gelişmiş FC’ler tercih edilmelidir.
🔌 FC Üzerindeki Pedler ve Bağlantılar
Flight controller’lar sadece bir işlemci değil, aynı zamanda birçok bileşeni birbirine bağlayan bir merkez üssü gibidir. Üzerlerinde çeşitli pad’ler (lehim noktaları) veya pin header’ları bulunur. Bu bağlantı noktaları sayesinde diğer bileşenler (ESC, GPS, VTX, alıcı, buzzer vb.) FC’ye bağlanır. İşte örnek olarak en yaygın pad türleri ve işlevleri:

Speedybee f405 V4 Flight Controller Ped ve Bağlantı Şeması
5V / G / CAM / CC / RS / 3V3 / G / 4V5 / R2 / T2
5V / G: Kamera gibi 5V ile çalışan cihazlara güç vermek için.
CAM: Kamera sinyal girişi (genellikle FPV kamera burada bağlanır).
CC: Camera Control – Betaflight’tan kamera OSD menüsüne giriş sağlar (bazı kameralarda).
RS: Kamera kontrol sinyali için alternatif pad.
3V3: 3.3V çıkış – bazı alıcılar veya sensörler için (çok yaygın değildir).
4V5: 4.5V çıkış – genellikle VTX veya alıcı için besleme.
R2 / T2: UART2 RX ve TX pad'leri → örneğin GPS bağlamak için kullanılır.
R3 / T3 / G / M5 / M6 / M7 / M8 / TEL / S9 / SBUS (R2)
R3 / T3: UART3 RX / TX → Telemetri veya SmartAudio bağlantısı için kullanılabilir.
G: Toprak hattı.
M5–M8: Ek motor çıkışları. ESC sinyalleri burada bağlanır.
TEL: ESC telemetri sinyali (RPM, voltaj vb. veriler için).
S9: Motor 9 çıkışı – genelde kullanılmaz.
SBUS (R2): Alıcı sinyal girişi. SBUS protokolüyle çalışan alıcılar buraya bağlanır (örneğin FrSky R-XSR).
SDA / SCL / 5V / G / LED / 5V / BAT / G / 5V / BZ+ / BZ-
SDA / SCL: I2C bağlantı noktası – pusula gibi sensörler içindir.
LED: Harici programlanabilir LED bağlantısı.
BAT: Batarya voltaj algılama girişi (VBAT).
BZ+ / BZ-: Buzzer bağlantısı.
4V5 / G / T6 / R6 / 9V / G / VTX / T1 / R1 / SBUS (R2)
T6 / R6: UART6 – örneğin HD VTX, GPS, telemetri modülü için kullanılabilir.
9V: 9V regüle çıkış – DJI VTX gibi yüksek voltaj isteyen sistemler için.
VTX: Video sinyali çıkışı (kamera görüntüsü buradan VTX’e gider).
T1 / R1: UART1 – genellikle alıcı için tercih edilir (ELRS gibi).
SBUS: Alternatif SBUS girişi (aynı sinyal üstteki SBUS (R2) ile ortak olabilir).
🔁 UART Nedir?
UART (Universal Asynchronous Receiver Transmitter), FC ile başka bir cihaz (örneğin GPS, alıcı, VTX, telemetri modülü) arasında iki yönlü haberleşme kurmak için kullanılan dijital bağlantıdır. Her UART, iki pad'den oluşur:
TX (Transmit): Veri gönderir
RX (Receive): Veri alır
Not: TX RX’e, RX TX’e bağlanır. Yani çapraz şekilde.
FC’lerde genellikle UART1, UART2, UART3 gibi birden fazla UART hattı bulunur. Bu sayede aynı anda birçok cihaz FC’ye bağlanabilir.
🔚 Sonuç
Flight controller, bir FPV sistemin sinir ağıdır. Tüm sistemin çalışması, sensörlerden alınan verilerin doğru şekilde işlenmesi ve bileşenlerin sorunsuz bir şekilde haberleşmesi için merkezî bir role sahiptir. Başarılı bir uçuş, doğru bir FC seçimi ve sağlıklı bir bağlantı ile başlar.
Electronic Speed Controller (ESC) – Elektronik Hız Kontrolcüsü
ESC, bir FPV dron’un motorlarına ne kadar ve ne hızda güç gideceğini kontrol eden elektronik birimdir. Kumandadan gelen gaz komutu, flight controller (FC) tarafından yorumlanır ve bu komut ESC’ye iletilir. ESC, bu bilgiyi alarak motorlara uygun gücü gönderir ve motorların dönüş hızını ayarlar. Kısaca söylemek gerekirse:
Pilot gaz verir → FC komutu işler → ESC’ye iletir → ESC motorlara güç gönderir.
🧠 ESC’nin Temel Görevleri
Flight controller’dan aldığı sinyalleri motorlara çevirir.
Her motorun hızını bağımsız olarak kontrol eder.
Gerektiğinde motorlara fren uygular ya da yönlerini tersine çevirebilir.
Bazı ESC’ler, telemetri aracılığıyla voltaj, sıcaklık ve motor devri gibi verileri FC’ye iletebilir.
🔢 ESC Türleri
🔹 Tekli (Bağımsız) ESC
Her motor için ayrı bir ESC modülü kullanılır. Özellikle sabit kanatlı uçaklarda yaygındır.
🔹 4-in-1 ESC (En yaygın)
4 motoru aynı kart üzerinden kontrol eden yapı. FC ile birlikte "stack" (üst üste) kuruluma uygundur ve kablo karmaşasını azaltır. Günümüzde FPV quadcopter’lerde neredeyse standart hâle gelmiştir.
🔹 2-in-1, 3-in-1 ESC
Nadir kullanılır. Genelde kompakt sistemler veya özel gövde tasarımları için tercih edilir.
🎛️ ESC Firmware Türleri
ESC’nin çalışma mantığı, içerisine yüklenen firmware’e bağlıdır. En yaygın ESC yazılımları şunlardır:
BLHeli_S: Temel seviye, 8-bit işlemci. DShot 600’e kadar destekler.
BLHeli_32: Gelişmiş, 32-bit işlemci. DShot1200, RPM telemetri, sıcaklık koruması ve daha fazla özelleştirme sunar.
KISS Firmware: Flyduino FC’lerle birlikte kullanılır, sade ama performans odaklıdır.
🔋 Batarya Güç Girişi (XT60 / XT90)
ESC doğrudan bataryadan gelen yüksek akımı işler. Bu bağlantı kalın kablolarla yapılır:
🔴 Kırmızı Pozitif (+) uç – Bataryadan gelen voltaj (örneğin 22.2V)
⚫ Siyah Negatif (–) uç – Toprak hattı (GND)
⚠️ Bu bağlantıda kutuplar karıştırılırsa ESC ve bağlı tüm elektronik bileşenler zarar görebilir.
🧯 Kapasitör Kullanımı
ESC üzerinde veya çıkışına paralel olarak bağlanan büyük elektrolitik kapasitörler, bataryadan gelen voltaj dalgalanmalarını filtreler ve ani akım çekişlerinde sistemi korur.
Yaygın değerler: 35V–50V, 470µF–1000µF
Kırmızı kabloya (+), siyah kabloya (–) bağlanır.
Mümkünse ESC’ye fiziksel olarak yakın yerleştirilmelidir.
Kapasitör, özellikle yüksek güçlü ESC’lerde veya 6S–8S batarya sistemlerinde olmazsa olmaz bir koruma katmanıdır.
🔌 ESC – Flight Controller Bağlantısı
Modern sistemlerde 4-in-1 ESC’ler, FC’ye bir soket kablosu ile bağlanır. Bu kabloda genellikle şu hatlar bulunur:
Motor sinyal çıkışları (S1–S4)
GND (toprak hattı)
CURR (akım sensörü)
VBAT (voltaj algılama)
TLM (telemetri, opsiyonel)
Soket kullanımı, lehim gerektirmez, hata riskini azaltır ve ESC arızası durumunda sistemin kolayca sökülüp yeniden takılmasını sağlar.
M pad’leri üzerinden bağlantı (Alternatif):
Bazı durumlarda FC üzerindeki M1–M4 pad’lerine sinyal kabloları doğrudan lehimlenebilir. Bu yöntem daha esnektir ancak:
Lehim becerisi gerektirir,
Hata yapma riski artar,
Soketli yapıya göre montaj ve söküm daha zahmetlidir.
Yarış pilotları bazen M pad’lerini tercih etse de, çoğu kullanıcı soket bağlantısını tercih eder.
📡 ESC Telemetri: Gerekli mi?
ESC’ler telemetri verisi sağlayabilir (voltaj, sıcaklık, RPM gibi). Bu veri, TLM pad’i üzerinden flight controller’a iletilir. Ancak:
Günümüzde çoğu sistemde telemetri aktif olarak kullanılmaz.
BLHeli_32 desteklese de RPM Filter gibi işlevler artık telemetrisiz de çok iyi çalışmaktadır.
Telemetri bağlantısı, sadece sistem izleme veya gelişmiş OSD verisi isteyen kullanıcılar için faydalıdır.
Sonuç: İsteğe bağlı, kritik değil.
🧯 ESC Kalitesini Belirleyen Faktörler
Amper kapasitesi (örneğin 45A, 60A, 80A): Motorların maksimum akım ihtiyacına uygun olmalı.
Voltaj desteği: Kullanılan batarya hücre sayısına (3S, 4S, 6S, 8S...) uygun olmalı.
Firmware tipi ve protokol desteği: DShot600, 1200, RPM telemetri gibi destekler önemli.
Soğutma ve PCB kalitesi: Özellikle yüksek amperli ESC’lerde ısınma büyük sorun olabilir.
Pad yerleşimi ve lehim alanı: Montaj kolaylığı sağlar.
🔚 Sonuç
ESC, FPV drone sistemlerinde motorların hızını ve davranışını kontrol eden temel bileşendir. Modern 4-in-1 ESC’ler çoğunlukla flight controller’a soket kablolarıyla bağlanır ve voltaj dalgalanmalarını dengelemek için mutlaka bir kapasitörle desteklenmelidir. M pad’leri ve telemetri gibi bağlantılar hâlâ desteklense de, kullanıcıların büyük çoğunluğu sade, güvenli ve modüler bir sistem için soketli yapıları tercih eder.
Motorlar
FPV drone motorları, pervaneleri döndürerek dron’un havalanmasını, yönelmesini ve manevra yapmasını sağlar. Dört adet motor, flight controller’dan gelen komutlara göre farklı hızlarda dönerek dron’un stabilitesini ve yönünü belirler. Motorlar ne kadar güçlü, hızlı ve verimli çalışırsa, drone da o kadar etkili performans sergiler.
Kısacası: ESC sinyal gönderir → motorlar döner → drone havalanır ve kontrol edilir.
⚙️ Motor Türleri
FPV dron’larda kullanılan motorlar genellikle fırçasız (brushless) tiptedir. Bu motorlar manyetik alan prensibiyle çalışır ve fırçalı motorlara göre:
Daha az sürtünme,
Daha uzun ömür,
Daha yüksek güç çıkışı,
Daha verimli çalışma sunar.
🔢 Motorların Numara Formatı (Örneğin: 2306 1900KV)
FPV motorları genellikle iki sayısal bilgiyle tanımlanır:
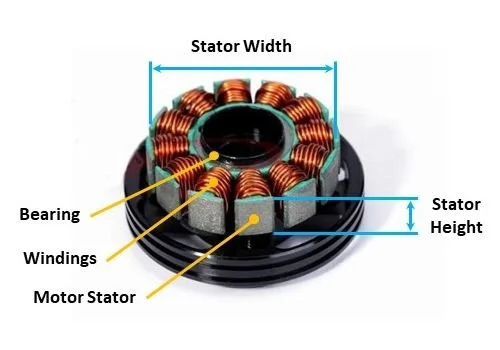
📏 1. Gövde Ölçüsü (örneğin 2306)
23: Stator çapı (mm)
06: Stator yüksekliği (mm)
Bu değerler ne kadar büyükse, motor o kadar güçlüdür ancak genellikle daha fazla ağırlık ve enerji tüketimi anlamına gelir.
⚡ 2. KV Değeri (örneğin 1900KV)
KV, motorun volt başına kaç devir döndüğünü gösterir.
Örneğin 1900KV bir motor, 1 volt uygulandığında 1900 RPM döner (yüksüz).
Yüksek KV: Daha hızlı dönüş, daha fazla ani tepki, ama daha az tork.
Düşük KV: Daha fazla tork, daha verimli ama yavaş tepki.
KV değeri tek başına bir şey ifade etmez. Batarya voltajı (S sayısı) ve pervane boyutu ile birlikte düşünülmelidir.
🔁 Dönüş Yönü ve Motor Dizilimi
Dört motorun hepsi aynı yönde dönmez. Dönüş yönleri çapraz simetrik olacak şekilde ayarlanır.
FPV Quad'da Tipik Motor Yerleşimi:
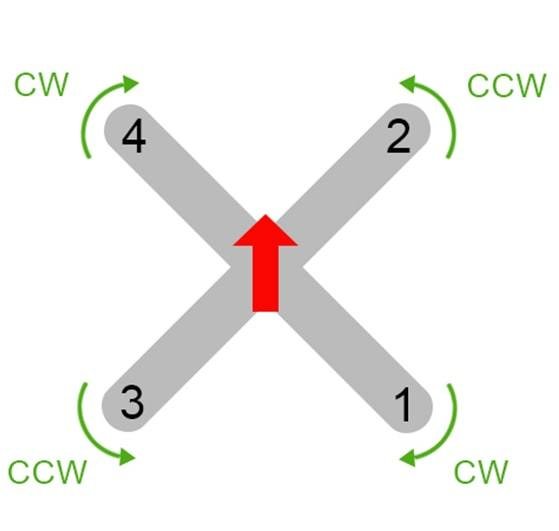
CW (Clockwise): Saat yönü
CCW (Counter-clockwise): Saat yönü tersi
Dönüş yönü yanlışsa: motor kablolarından ikisinin yeri değiştirilir.
Bu yönler Betaflight gibi yazılımlarda da tanımlanmalıdır.
🔄 “Props In” ve “Props Out” Nedir?
Bunlar, drone üzerindeki pervanelerin hangi yöne doğru döndüğünü ve itki kuvvetini içe mi yoksa dışa mı yönlendirdiğini belirten terimlerdir. Görselde de gösterildiği gibi:
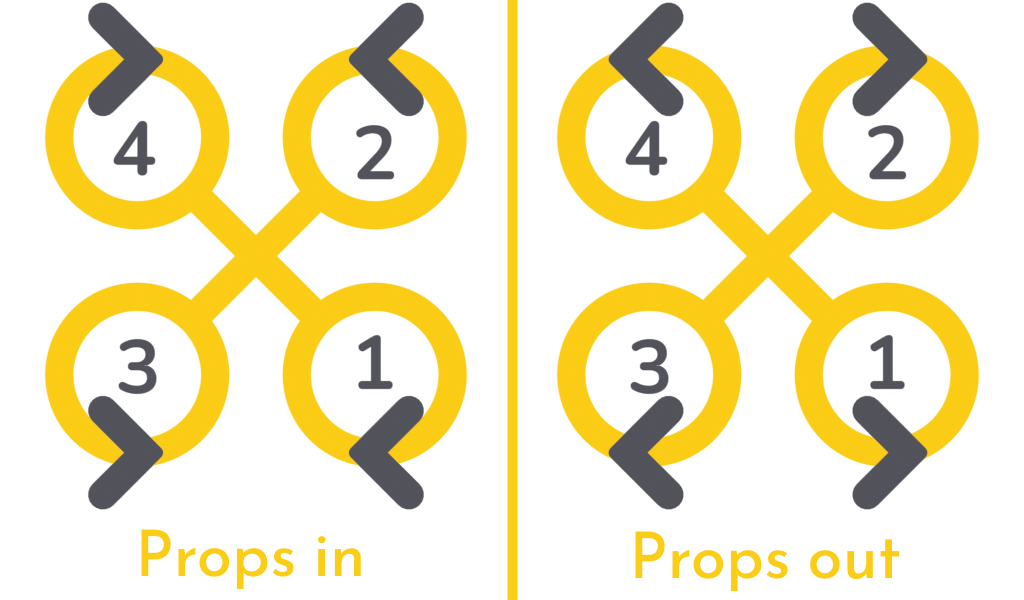
▶️ Props In (İçe Dönen Pervaneler)
🟡 Tanım:
Ön pervaneler, gövdenin merkezine doğru itki uygular.
Yani:
Motor 1: Saat yönü
Motor 2: Saat yönü tersi
Motor 3: Saat yönü
Motor 4: Saat yönü tersi
Ama ön pervaneler içe doğru “basar”.
✅ Avantajları:
Daha stabil uçuş sağlar, çünkü eski sistemlerde Betaflight ve PID'ler buna göre optimize edilmişti.
Konfigürasyon ve yedek parça uyumu daha yaygındır (varsayılan sistemdir).
Birçok BNF (bind-and-fly) drone bu şekilde gelir.
❌ Dezavantajları:
Öne doğru hızlı uçarken uçuş sırasında öndeki pervaneler, kamera lensine kir, toz ve çim parçacıkları fırlatabilir.
Dar alanlarda uçarken gövdeye yapışan hava türbülansı daha yüksek olabilir.
◀️ Props Out (Dışa Dönen Pervaneler)
🟡 Tanım:
Ön pervaneler, gövdenin dışına doğru itki uygular.
Yani:
Motor 1: Saat yönü tersi
Motor 2: Saat yönü
Motor 3: Saat yönü tersi
Motor 4: Saat yönü
Bu sefer ön pervaneler dışa doğru “basar”.
✅ Avantajları:
Daha az kirlenme: Dışa doğru basan pervaneler, çim ve tozu kameradan uzağa atar.
Ters çevrilmiş uçuşlarda (inverted yaw) daha doğal his verir (freestyle pilotları için önemli).
Kol kenarındaki türbülans azalır, özellikle cinewhoop gibi hassas sistemlerde daha temiz hava akışı sağlar.
❌ Dezavantajları:
Bazı FC yazılımları (eski Betaflight sürümleri) varsayılan olarak props in için ayarlıdır.
ESC sinyalleri veya motor yönleri değiştirilmelidir.
Bind-and-fly (hazır) dron’larda ekstra ayar gerekebilir.
🔧 Props Out’a Geçmek İstiyorsan Ne Yapmalı?
Motor yönlerini değiştir: BLHeliSuite / BLHeli_32 configurator üzerinden.
Pervaneleri ters tak: CW pervane → CCW motora, CCW pervane → CW motora.
Betaflight’ta “Props direction reversed” seçeneğini aktif et.
Görsel test yap: Motor yönü + pervane yönü doğruysa, drone havalanır.
🎯 Hangi Yönü Tercih Etmeli?
Yeni başlıyorsan: Props In kullan, daha yaygın ve desteklenen sistemdir.
Freestyle / cinematic uçuş yapıyorsan: Props Out geçişi kamera temizliği ve uçuş dinamiği açısından avantaj sağlar.
Long-range / yarış: İki sistem de olur; genelde pilotun tercihi ve frame yapısına göre karar verilir.
🔩 Montaj ve Vidalama
Motorlar frame üzerindeki kollara 3 veya 4 vida ile sabitlenir.
Vidalama uzunluğu çok önemlidir:
Çok kısa olursa motor gevşer,
Çok uzun olursa statora zarar verebilir.
M3 vidalar kullanılır; genelde 6–8 mm boyundadır (frame kalınlığına göre).
📎 İpucu: Motor montajında Loctite (vida sabitleyici) kullanmak, titreşimle gevşemeyi önler.
⚠️ Dikkat Edilmesi Gerekenler
ESC uyumu: ESC amper kapasitesi motorun çekeceği akıma uygun olmalı.
Prop uyumu: Her motor belirli bir pervane aralığı için tasarlanmıştır.
Yüksek KV motorlarda: Isınma, ESC zorlanması ve batarya süresi azalabilir.
Uçuş tarzına göre seçim:
Yarış: hafif, yüksek KV, ani tepki
Freestyle: orta KV, yüksek tork
Long-range: düşük KV, yüksek verimlilik
📑 FPV Motor Datasheet Nasıl Okunur?
Motor datasheet’i, bir motorun ne kadar güç üretebildiğini, hangi pervanelerle nasıl davrandığını ve sistemin sınırlarını gösteren teknik dökümandır. Örnek olarak elimizde T-Motor F40PRO IV 1950KV motorunun, T5147 tri-blade pervane ile 6S (yaklaşık 24V) altında test edilmiş bir datasheet’i var. Aşağıda tabloyu adım adım okuyarak bu motorun sınırlarını, verimliliğini ve nasıl analiz yapılacağına bir bakalım.
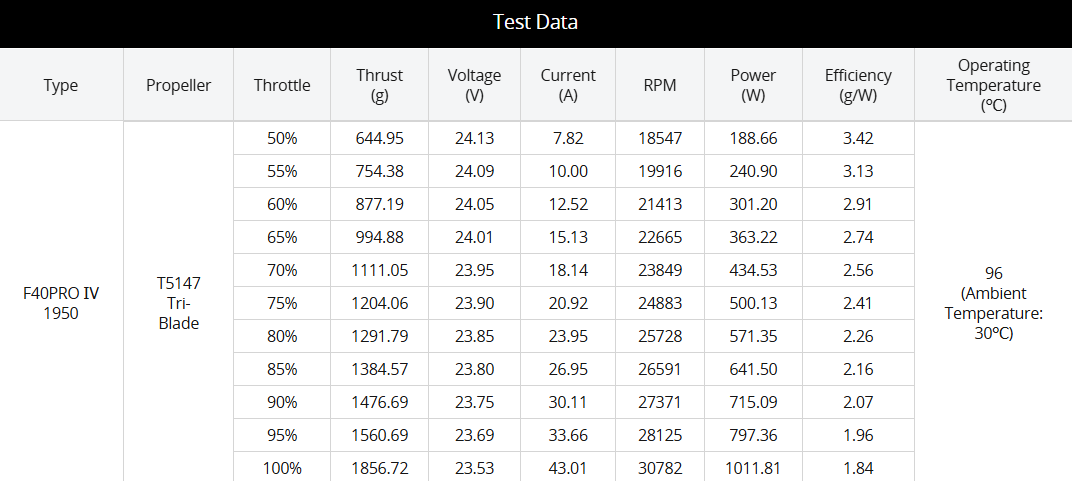
📌 1. Throttle – Gaz Seviyesi
Buradaki her satır, throttle (gaz) yüzdesini ifade ediyor. %50’den %100’e kadar test edilmiş.
🟡 Ne kadar çok throttle → o kadar çok akım ve RPM → o kadar çok thrust (itki).
📌 2. Thrust (g) – Üretilen Kuvvet
Örneğin %100 gazda motor tam 1856.72 gram itki üretiyor.
%50’de bu 644.95 gram.
🟢 Bu değer, dron’un toplam ağırlığının üzerinde olmalı ki uçabilsin.
Yani 4 motor x 1856g = 7424g teorik maksimum itki → 1.5-2kg’lık bir drone rahat kaldırılır.
📌 3. Voltage (V) – Voltaj Seviyesi
Genelde 6S batarya ile 24V civarı.
Yük arttıkça (throttle yükseldikçe) voltaj biraz düşüyor, çünkü batarya yük altına giriyor.
📌 4. Current (A) – Çekilen Akım
%100 gazda tam 43.01A çekiyor!
⚠️ ESC’nin bu akımı taşıyabilecek kapasitede olması gerek.
Yani 50A ESC kullanmak burada mantıklı olur.Düşük gazlarda 7–10A gibi değerler görülüyor.
📌 5. RPM – Motor Devir Sayısı
%100 gazda: 30.782 RPM
%50 gazda: 18.547 RPM
🧠 Bu değer, pervane aerodinamiğini etkiler. Uygun pitch ve çap seçimi RPM'e göre yapılır.
📌 6. Power (W) – Harcanan Güç
Power = Voltage x Current
Örneğin %100 throttle’da:
23.53V x 43.01A ≈ 1011.81 Watt
📛 Bu motor tek başına 1kW’a yakın güç tüketiyor. 4 motor → 4kW toplam.
🔋 Batarya ve ESC’nin bu gücü beslemesi gerek.
📌 7. Efficiency (g/W) – Verimlilik
En önemli sütunlardan biri!
1 watt başına kaç gram itki üretildiğini gösterir.
En verimli nokta: %50 throttle → 3.42 g/W
En verimsiz nokta: %100 throttle → 1.84 g/W
🧠 Yani:
Daha çok throttle = daha çok güç = daha az verim
Bu yüzden optimum uçuş için %50–75 throttle aralığı genelde idealdir.
📌 8. Operating Temperature (°C) – Sıcaklık
Test sonunda motor sıcaklığı 96°C olmuş (ortam 30°C iken).
⚠️ Bu da gösteriyor ki sürekli %100 throttle motoru epey ısıtıyor.Isı → mıknatısları zayıflatabilir, sargıları yakabilir.
Yani sürekli maksimum yükle çalışmak motor ömrünü azaltır.
📊 Bu Verilerle Ne Yaparız?
ESC seçimi: En az 45A, tercihen 50A
Batarya seçimi: 6S, en az 100C ve sağlam bir LiPo
Soğutma: Açık çerçeve, fazla ısıya dayanıklı komponentler
Uçuş tarzı: Sürekli yüksek throttle yerine %60–80 arası daha verimli
🔚 Sonuç
Motorlar, FPV dron’un itiş gücünü sağlar ve uçuş karakterini belirler. KV değeri, stator boyutu, ağırlık ve uyumlu pervane seçimleri birlikte düşünülmelidir. Yanlış motor seçimi, ESC'nin zorlanmasına, bataryanın çabuk bitmesine veya dengesiz uçuşa neden olabilir. Güçlü, verimli ve sağlam motorlar, gökyüzünde güvenin garantisidir.
Pervaneler (Props)
FPV dron’un havalanmasını, süzülmesini, hızlanmasını ve ani manevralar yapmasını sağlayan parça pervanelerdir. Motorların dönme hareketi, pervaneler sayesinde havayı aşağıya doğru iter, bu da dron’un yukarı çıkmasını (itki/thrust üretmesini) sağlar.
Ancak sadece dönmek değil; nasıl döndükleri, ne kadar eğimli oldukları, kaç kanatlı oldukları ve ne büyüklükte oldukları uçuş performansında ciddi fark yaratır.
📐 Pervane Üzerindeki Rakamlar Ne Anlama Geliyor?
Pervaneler genellikle şu formatla adlandırılır:
5x4.3x3
Yani: 5 inç çap, 4.3 pitch, 3 blade (kanat)
Açıklayalım:
sırasıyla 5 inç çap, 4.3 inç pitch (eğim) ve 3 bıçak (kanat) anlamına gelir. Çap büyüdükçe pervane daha fazla hava iter, dolayısıyla daha fazla itki üretir. Pitch ise pervanenin bir turda teorik olarak havada ne kadar yol alacağını gösterir. Pitch arttıkça itki artar ama motorun çektiği akım ve ısınma da artar. Bıçak sayısı arttıkça kontrol kabiliyeti yükselir ancak verimlilik biraz düşebilir.
Kanat sayısı (genellikle 2, 3 veya 4)
🧠 Pervane Özelliklerinin Uçuşa Etkisi
🔸 1. Çap (Size)
Büyük çap (6”–7”) → Daha fazla itki, daha fazla güç tüketimi, daha yavaş tepki
Küçük çap (3”–4”) → Daha çevik, daha az itki, daha az tüketim
5” → Freestyle ve yarış için en yaygın boyut
🔸 2. Pitch (Eğim)
Düşük pitch (3.1 – 3.6) →
Daha yumuşak uçuş
Daha az akım çekimi
Daha uzun uçuş süresi
Yüksek pitch (4.8 – 5.1 ve üstü) →
Daha agresif uçuş
Daha fazla hız
Daha fazla yük bindirme ve ısınma
🔸 3. Blade Sayısı
2 Blade (Bi-blade):
Daha hafif, daha verimli
Daha az itki ve stabilite
3 Blade (Tri-blade):
En yaygın yapı
Dengeli performans ve kontrol
4 Blade ve üzeri:
Daha yüksek kontrol, daha az verim
Genellikle cinewhoop ve sinematik uçuşlarda
🔩 Pervane-Motor Uyumu
Motor datasheet’lerinden öğrendiğimiz gibi, pervaneler motora fazla yük bindirebilir.
Örneğin:
T5147 pervane + 1950KV motor → %100 gazda 43A akım çekiyor
Bu nedenle:
Motorun taşıyabileceği pervane sınırını datasheet’ten gör
Aksi hâlde ESC veya batarya zarar görebilir
🧪 Malzeme Seçimi
Polikarbonat: Sert ve dayanıklı, en yaygın
Naylon: Ucuz ama kırılgan
Karbon takviyeli: Daha rijit ama pahalı
TPU (esnek): Cinewhoop'larda güvenli çarpışma için ideal
⚠️ Takarken Dikkat!
Pervaneler doğru yönde takılmalı
CW (saat yönü) motorlara CW pervane
CCW (ters yönde) motorlara CCW pervane
Sıkıca oturtulmalı – özellikle racing’de vidalı sistem kullanılmalı
🔚 Sonuç
Pervaneler, uçuş performansının temel taşıdır. Motor, ESC, batarya uyumu dikkate alınmadan seçilen pervane sistemde dengesizlik, aşırı ısınma veya düşük verimlilik yaratabilir. Bu yüzden motor datasheet’ine bakarak en verimli ve güvenli seçimi yapmak şarttır.
VTX (Video Transmitter – Görüntü Vericisi)
FPV drone sistemlerinde VTX, kameradan gelen görüntüyü kablosuz olarak pilotun gözlüğüne ya da ekranına ileten donanımdır. Bu bileşen, FPV uçuşun gerçek zamanlı görsel deneyimini mümkün kılar. Uçarken dron’un “gözünden” bakmak için, güçlü ve doğru yapılandırılmış bir VTX sistemi şarttır.
Ancak görüntü aktarım teknolojisi sadece bir verici anteninden ibaret değildir. Bu sistem; analog ve dijital aktarım, frekans bandı, anten seçimi, protokol kontrolü, soğutma gibi birçok parametrenin dengesine dayanır.
🎥 Analog ve Dijital FPV Sistemleri
🔸 Analog FPV
Geleneksel ve hâlen yaygın kullanılan sistemdir.
Avantajları:
Düşük gecikme süresi (low latency)
Hafif ve ucuz sistemler
Basit kurulum ve çok sayıda hazır parça
Dezavantajları:
Görüntü kalitesi düşüktür (karıncalanma, parazit)
Dijital sistemlere göre daha fazla sinyal kaybı yaşar
Sinyal mesafesi çevre koşullarına çok duyarlıdır
🔹 Dijital FPV (örnek: DJI, Walksnail, HDZero)
Son yıllarda popülerleşen yüksek kaliteli görüntü aktarımı sunan sistemlerdir.
Avantajları:
Net, HD kalitesinde görüntü
Telemetri ve OSD bilgileriyle entegre yapı
Dezavantajları:
Pahalı
Daha ağır donanım
Gecikme süresi (latency) bazı sistemlerde artabilir
Açık kaynak yazılım ve donanım desteği sınırlı olabilir
📊 Yaygın Frekans Bantları
FPV sistemleri çeşitli frekanslarda çalışır. Seçilen frekans, menzil, görüntü kalitesi ve parazit hassasiyetini doğrudan etkiler.
En sık kullanılan FPV frekansları:
5.8 GHz
En yaygın kullanılan banttır
Küçük antenler, düşük ağırlık
Yüksek bant genişliği, düşük menzil
Binalardan daha kolay etkilenir
2.4 GHz
Orta mesafeli kullanım için tercih edilir
Daha iyi duvar/engelden geçiş, ama Wi-Fi ile çakışma riski yüksek
1.2 / 1.3 GHz
Uzun menzilli sistemler için idealdir
Daha büyük anten ve lisans ihtiyacı olabilir
Gecikmesi düşüktür, sinyal penetrasyonu yüksektir
900 MHz
Çok uzun menzil ama düşük görüntü kalitesi
Yasal kullanımı bazı ülkelerde sınırlıdır
Not: Görüntü sistemiyle kontrol sisteminin farklı frekanslarda olması şarttır. Örneğin hem RC link’in hem de video link’in 2.4 GHz olması ciddi çakışmalara neden olabilir.
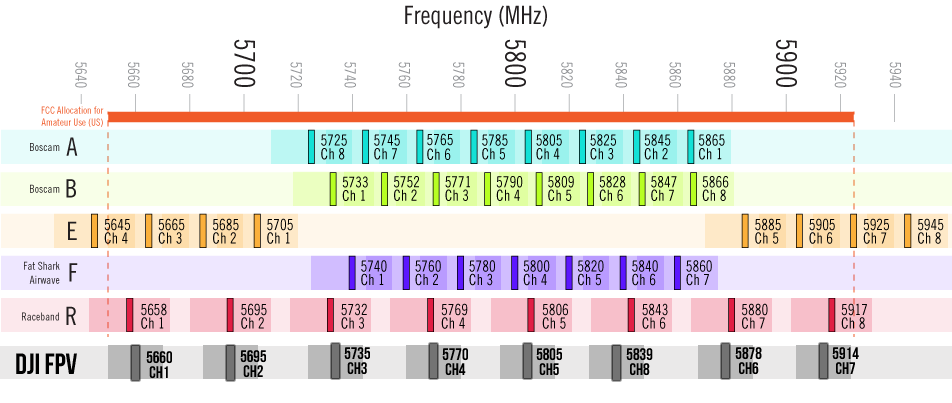
5.8 GHz için kullanılan frakans bantları ve kanal tablosu
📡 VTX Teknik Özellikleri
1. Güç Çıkışı (mW)
VTX’in ne kadar güçlü sinyal yayabildiğini belirler.
25 mW: Yarış ortamları, düşük menzil
200–800 mW: Açık alan, normal uçuş
1000+ mW: Uzun menzil, kalabalık frekans ortamı
Güç arttıkça menzil artar ama batarya tüketimi, ısınma ve parazit riski de yükselir.
2. Frekans Bandı ve Kanal Sayısı
VTX’ler 5.8 GHz bandında genelde 40 kanal destekler. Bunlar A, B, E, F, R gibi gruplara ayrılır.
Yarışlarda aynı frekansta birden fazla kişi uçmaması için herkesin farklı kanal kullanması gerekir.
3. Pitmode
Drone açıldığında VTX’in minimum güçte çalışmasını sağlayan güvenlik modudur. Pit alanında sinyal yaymadan sistemi test etmeye imkân tanır.
4. SmartAudio ve IRC Tramp Protokolleri
Bu protokoller sayesinde VTX’in kanal, frekans ve güç ayarları uçuş kontrolcüsü (FC) üzerinden, yazılımsal olarak değiştirilebilir. Betaflight OSD menüsünden veya LUA script ile Taranis gibi kumandalardan kontrol mümkündür.
Bağlantı için genelde UART üzerinden tek hatlı dijital bağlantı (TX pad) kullanılır.
🔌 Bağlantı Yapısı
VTX genellikle FC üzerinden bağlanır.
Video In (VI): Kameradan gelen sinyal
VCC / 5V / 9V: VTX’in ihtiyaç duyduğu besleme voltajı
GND: Toprak hattı
SmartAudio: (opsiyonel) kontrol protokolü bağlantısı
Ayrıca VTX çalıştırılmadan önce mutlaka anten takılmış olmalıdır. Aksi hâlde sinyal boşta kalır ve VTX ısınarak zarar görebilir.
🌡️ Isınma, Soğutma ve Montaj
VTX’ler özellikle yüksek güç seviyelerinde çok fazla ısınabilir.
Uzun süreli uçuşlarda metal heatsink veya aktif fan kullanımı önerilir
Uçuş öncesi yerde açık bırakmak VTX’i yakabilir
Kabloların ve VTX’in frame içinde hava akımına uygun yerleştirilmesi ısı kontrolü için önemlidir
📶 Anten Uyumu
VTX’in performansı, antenin tipi, konumu ve polarizasyonu ile doğrudan ilişkilidir.
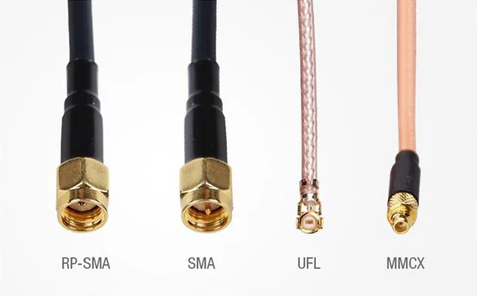
Anten bağlantı türleri:
MMCX, U.FL, SMA, RP-SMA
Anten polarizasyonu da önemlidir:
RHCP (sağ el) ve LHCP (sol el)
Gönderici ve alıcı aynı polarizasyonda olmalıdır, aksi hâlde sinyal ciddi oranda zayıflar.
🔚 Sonuç
VTX, FPV sistemin sinir ucu gibidir. Görüntünün netliği, gecikme süresi ve menzil gibi hayati konular VTX seçiminde belirleyicidir.
Analog sistemler hâlen yaygın ve ucuzdur
Dijital sistemler ise daha net görüntü sunar ama pahalıdır
Frekans çakışmalarına, anten uyumuna ve voltaj toleransına dikkat edilmelidir
SmartAudio gibi protokoller sayesinde esnek sistem kontrolü elde edilebilir
RX (Receiver – Alıcı)
RX, yani alıcı modül, kumandandan gelen uçuş komutlarını dron’un uçuş kontrolcüsüne (FC) ileten parçadır. Basitçe söylersek: ellerinizle yaptığınız her hareketin dron’a ulaşmasını sağlar. Bu sistem olmadan drone kontrol edilemez, bu yüzden güvenilir bir RX sistemi her şeyin temelidir.
📡 RX Nasıl Çalışır?
Kumandan (TX – transmitter) bir sinyal gönderir, RX ise bunu alıp uçuş kontrolcüsüne iletir. Bu iletişim dijitaldir ve genellikle seri protokoller kullanılır (örneğin SBUS, CRSF, iBUS, DSMX vb.).
Uçuş kontrolcüsü, RX’ten aldığı sinyalleri yorumlayarak motorlara ve diğer sistemlere komut verir.
🔄 Yaygın Radyo Protokolleri
FrSky (ACCST, ACCESS):
Eski sistemlerde yaygındır
SBUS veya FPORT ile çalışır
Ucuzdur ama parazit ve sinyal kopması olabilir
ELRS (ExpressLRS):
Açık kaynak, ultra düşük gecikmeli sistem
2.4 GHz veya 900 MHz bandında çalışabilir
Küçük boyutlu alıcılarla uzun menzil
Betaflight ile entegre çalışır (CRSF protokolüyle)
Crossfire (TBS):
868 / 915 MHz bandında uzun menzilli sistem
CRSF protokolü kullanır
Düşük gecikme ve güçlü penetrasyon
ELRS’e göre daha pahalı ama hâlen yaygın
Ghost, Tracer, DSMX vb.:
Diğer özel sistemlerdir
Bazıları yarış için optimize edilmiştir
Genellikle Crossfire veya ELRS kadar yaygın değildir
🔌 Bağlantı Şeması
RX’in uçuş kontrolcüsüne bağlanması genelde şu şekildedir:
5V / 3.3V: Güç girişi (RX modeline göre dikkat edilmelidir!)
GND: Toprak hattı
TX / RX (UART): Protokole bağlı olarak veri iletim hattı
Bind düğmesi / pad: Kumandayla eşleştirme işlemi için
Not: ELRS gibi bazı alıcılar USB veya WiFi ile yapılandırılabilir. Ayrıca OTA (Over The Air) güncelleme desteği de sunarlar.
📶 Anten Yapısı
Alıcı antenleri sinyal alma kalitesini doğrudan etkiler.
Diversity (çift antenli) RX’ler, sinyali farklı açılardan alarak daha kararlı bağlantı sağlar
Antenler 90 derece açılarla yerleştirilmelidir (biri yatay, biri dikey)
Uzun menzil sistemlerde, IPEX – u.FL konnektörlü dış antenler kullanılır
🔐 Binding (Eşleştirme) Süreci
RX ile kumanda arasında bir kereye mahsus “bind” (eşleşme) işlemi yapılmalıdır. Bu işlem sırasında:
Kumanda bind moduna alınır
RX üzerindeki bind düğmesine basılır veya bind pad kısa devre edilir
LED’lerin değişimiyle eşleşme tamamlanır
ELRS gibi sistemlerde bu işlem LUA script, WiFi arayüz veya ExpressLRS Configurator ile kolayca yapılabilir.
🧠 Telemetri Desteği
Bazı RX’ler, sadece kontrol sinyali değil, aynı zamanda batarya voltajı, RSSI (sinyal kalitesi), link kalitesi (LQ), hata oranı gibi verileri de kumandaya geri gönderebilir. Bu sayede uçuş sırasında bağlantının durumunu gözlemlemek mümkündür.
🔚 Sonuç
RX, bir FPV dron’un kontrol sisteminin temel taşıdır. Kullanılan protokol, frekans ve bağlantı şekli, uçuş güvenliği ve tepki süresi üzerinde büyük etki yapar.
Uzun menzil ve düşük gecikme için: ELRS veya Crossfire
Basit sistemlerde veya bütçe dostu projelerde: FrSky (SBUS / FPORT)
Mutlaka doğru voltajla beslenmeli ve anten yerleşimi dikkatli yapılmalıdır
Kamera
FPV drone kameraları, uçağın ön kısmına monte edilir ve uçuş sırasında pilotun canlı olarak göreceği görüntüyü sağlar. Bu görüntü, VTX aracılığıyla gözlüklere veya ekranlara aktarılır. FPV uçuş deneyiminin temeli olan bu bileşen, sistemin “gözüdür” ve gecikmesiz, net bir görüntü sağlamakla görevlidir.
Ancak FPV kamerası sadece bir video sensörü değildir; boyutu, montaj şekli, lens açısı, gecikme süresi ve sistem uyumu gibi birçok faktörü dikkatle seçmek gerekir.
📏 Kamera Boyutları (Mounting Standardları)
FPV drone frame’leri farklı boyuttaki kameralarla uyumlu olarak tasarlanır. Bu nedenle kamera seçimi yaparken frame ile fiziksel uyum çok önemlidir.
Yaygın kamera boyutları:
Nano: 14 mm genişlik
Micro: 19 mm genişlik (en yaygın olanıdır)
Mini: 21 mm
Standard: 28 mm (genellikle daha büyük DJI sistemleri için)
Örn: Freestyle ya da yarış dron’larda genellikle Micro (19 mm) kameralar tercih edilir. Cinewhoop veya özel projelerde Nano gibi daha küçük kameralar kullanılabilir.
Bu ölçü, kameranın yan yüzeylerindeki montaj delikleri arasındaki mesafeyi ifade eder. Uyumlu olmayan bir kamera frame’e sabitlenemez veya yanlış oturabilir.
⚙️ Teknik Özellikler
🔹 Gecikme Süresi (Latency)
Kameranın görüntüyü alıp VTX’e göndermesi arasındaki süredir.
Analog sistemlerde 10–30 ms civarı
Dijital sistemlerde genelde 28–50 ms aralığında
Gecikme süresi ne kadar düşükse, pilotun kontrol tepkisi o kadar keskin olur.
🔹 Çözünürlük
Analog: 600 TVL – 1200 TVL
Dijital: 720p – 1080p ve üzeri
Daha yüksek çözünürlük, daha detaylı görüntü sunar ancak görüntü aktarım sisteminin de buna uygun olması gerekir.
🔹 Lens Açısı (FOV – Field of View)
Genellikle 120°–170° arasında değişir
Geniş açı daha fazla çevresel farkındalık sağlar
Ancak çok geniş açılar görüntüde balık gözü (fisheye) etkisi yaratabilir
🔹 Görüntü Oranı
4:3: FPV uçuşlarında daha geleneksel, dikey algı güçlü
16:9: Sinematik görüntü isteyenler için daha uygun
Gözlüğünüzle uyumlu formatı seçmek gerekir.
🔹 Sensör Tipi
CMOS: Hafif, ucuz, yaygın
CCD: (artık nadir) daha az jello, daha doğal renk
🔌 Bağlantı Yapısı
Kamera tipik olarak uçuş kontrolcüsüne veya doğrudan VTX’e bağlanır:
Video Out (VO): Görüntü çıkışı
GND: Toprak hattı
5V veya 3.3V: Güç girişi
OSD / Menu / Control: Bazı kameralarda küçük joystick ile ayarlar yapılabilir
Dikkat: Kameranın istediği voltaj değerine göre besleme yapılmalı. Aksi takdirde kamerayı yakabilirsiniz.
🌗 Ek Özellikler
WDR (Wide Dynamic Range): Işık değişimlerinde görüntünün stabil kalmasını sağlar. Özellikle güneşe karşı uçarken veya gölgeli alanlardan çıkarken görüntünün patlamasını engeller.
OSD Kontrolü: Parlaklık, kontrast gibi parametreler joystick ya da menü kontrol kablosuyla ayarlanabilir.
✅ Seçim Tavsiyeleri
Freestyle / Racing: Micro boyutlu, düşük gecikmeli, geniş açılı WDR destekli kameralar idealdir
Cinewhoop: Nano veya hafif micro kameralar tercih edilir
Dijital sistemler: Kendi sistemine özel kamera gerektirir (örneğin DJI FPV Unit ile DJI kamera)
🧷 Montaj Notları
Frame’in kamera yerleşimi hangi boyuta göre tasarlanmışsa, o boyutta kamera kullanılmalıdır
3D baskı adaptörlerle farklı boyutlar uyarlanabilir
Lensin çerçeveyle tam hizalanması önemlidir; aksi takdirde görüntüde çarpılma ya da görüş kaybı olabilir
🔚 Sonuç
FPV kamerası, sadece görüntü sağlamakla kalmaz, pilotun uçuş stilini doğrudan etkiler.
Uyumlu boyut, doğru lens ve düşük gecikme, başarılı bir FPV deneyimi için temel şarttır
WDR ve geniş açı gibi özellikler, zorlu ortamlarda uçuş kontrolünü artırır
Uygun montaj ve voltaj bağlantısıyla uzun ömürlü ve sorunsuz bir sistem kurulabilir
Antenler
FPV drone sistemlerinde antenler, görüntü vericisi (VTX) ve gözlükteki alıcı (VRX) arasında kablosuz iletişimi sağlayan parçalardır. Ayrıca kumanda ile alıcı (RX) arasında da kontrol sinyallerini taşıyan antenler kullanılır. Her anten, doğru konumlandırıldığında sistemin menzilini artırır, paraziti azaltır ve genel sinyal kalitesini iyileştirir.
🌀 Polarizasyon: RHCP vs. LHCP
Antenler iki tür dairesel polarizasyona sahiptir:
RHCP (Right Hand Circular Polarized – Sağ el): Saat yönünde dönen sinyal
LHCP (Left Hand Circular Polarized – Sol el): Saat yönünün tersine dönen sinyal
🔁 Bu iki polarizasyon birbirine uymaz!
Yani: RHCP bir VTX anteni varsa, gözlükte de RHCP bir alıcı anten olmalıdır. Aksi hâlde sinyal %90’a varan oranda zayıflar.
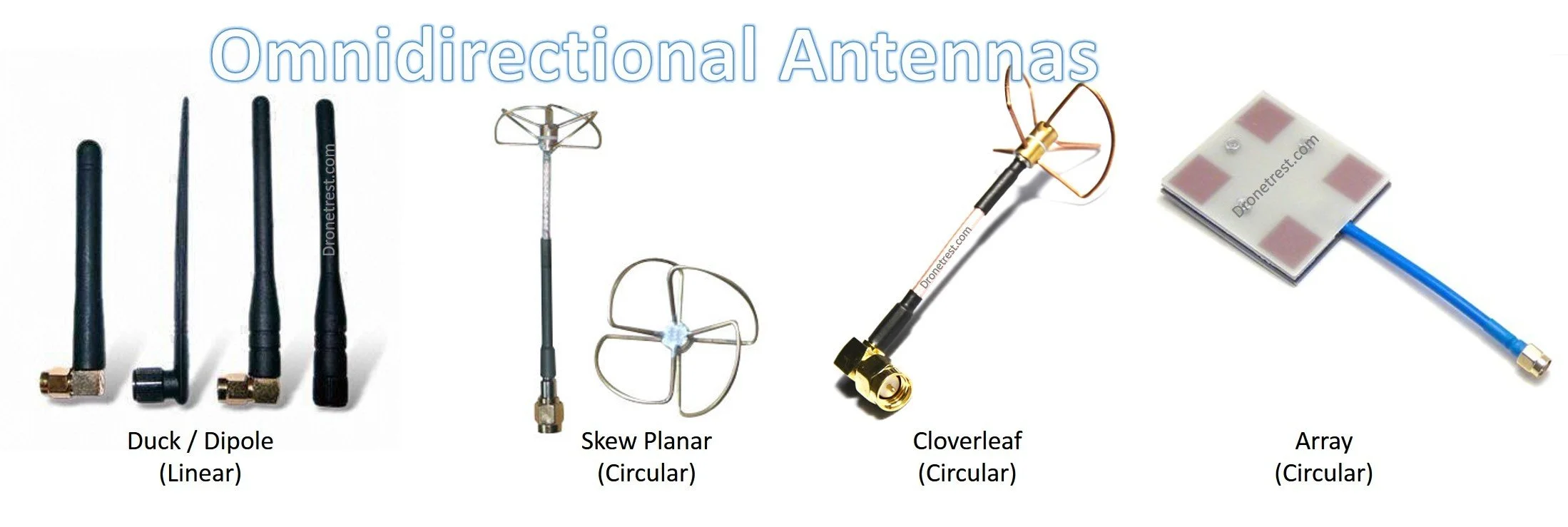
📡 Anten Türleri
1. Omnidirectional (Çok Yönlü) Antenler
Genellikle VTX’te kullanılır
360° çevreye sinyal yayar
Drone hareket halindeyken her açıdan sinyal alınmasını sağlar
Örnek: “Pagoda”, “Lollipop”, “Skew Planar” tasarımlar
2. Directional (Yönlü) Antenler
Genellikle FPV gözlüklerinde kullanılır
Belirli bir yöne yüksek kazançlı sinyal gönderir / alır
Uzun menzil uçuşları ve sabit yönlü uçuşlar için idealdir
Örnek: Patch, Helical, Crosshair antenler
En iyi sonuç için:
📡 Gözlükte bir yönlü (patch) + bir çok yönlü (omni) anten kombinasyonu kullanılır.
📶 Frekans Uyumu
Antenin tasarlandığı frekansla kullandığınız sistem tam uyumlu olmalıdır.
FPV’de en sık kullanılan frekanslar:
5.8 GHz: Görüntü aktarımı
2.4 GHz: Kumanda veya bazı özel FPV sistemleri
900 MHz – 1.3 GHz: Uzun menzilli özel sistemler
Antenlerin frekans bandı, genellikle ürün üzerinde etiketlenir.
Örn: “5.8GHz RHCP SMA” → Bu anten 5.8GHz frekansında çalışır, RHCP polarizasyona sahiptir ve SMA konnektöre bağlanır.
🔗 Konnektör Tipleri
Antenin VTX’e veya gözlüğe nasıl bağlandığı da önemlidir.
Yaygın konnektör türleri:
SMA
RP-SMA
MMCX
U.FL (IPEX) – ultra küçük, genellikle micro dron’larda
❗ SMA ve RP-SMA birbirine fiziksel olarak benzese de iç pin yapıları farklıdır. Uygunsuz eşleştirme antenin çalışmamasına neden olabilir.
🧊 Isı, Dayanıklılık ve Montaj
VTX anteni mutlaka monte edilmiş olmalı, aksi takdirde VTX kısa sürede ısınarak yanabilir.
Anten, VTX’ten fiziksel olarak biraz uzaklaştırılarak hava akımı sağlanmalıdır.
Uçuş sırasında kopmaması için zip tie, heatshrink veya 3D baskı tutucularla sağlamlaştırılmalıdır.
🛰️ Yönlendirme ve Yerleşim
Anten konumlandırması sinyalin performansını ciddi etkiler.
Omni antenler dikey, patch antenler ise hedefe dönük olmalıdır.
Antenlerin frame’e çok yakın olmaması, karbonla temasta bulunmaması gerekir. Çünkü karbon fiber RF sinyallerini zayıflatır.
🔚 Sonuç
Anten küçük gibi görünür ama FPV sistemin olmazsa olmazıdır:
Polarizasyon uyumu olmazsa görüntü zayıf veya hiç gelmez
Uyumlu frekans ve konnektör seçimi şarttır
VTX çalışırken anten takılı olmalıdır
Yönlü/yönsüz anten seçimi uçuş stiline göre yapılmalıdır

Batarya
FPV dron’larda genellikle LiPo (Lityum Polimer) ya da Li-Ion (Lityum İyon) bataryalar kullanılır. Bu bataryalar yüksek enerji yoğunluğuna sahip olup, kısa sürede yüksek akım sağlayabilirler. Ancak yanlış kullanımda patlama, yangın gibi riskler içerdiğinden dikkatli kullanılmalıdır.
⚙️ Batarya Seçiminde Temel Parametreler
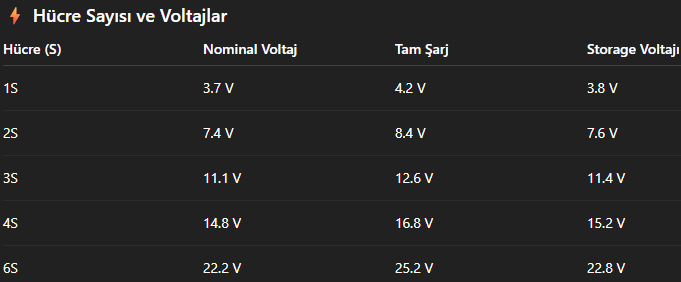
1. S (Sayı) – Hücre Sayısı (Gerilim)
1S = 3.7V (nominal), tam dolu 4.2V
3S = 11.1V
4S = 14.8V
6S = 22.2V
Hücre sayısı arttıkça voltaj artar ve motorlar daha hızlı döner. Ancak sistemdeki tüm parçaların bu voltaja uyumlu olması gerekir.
2. mAh (Kapasite)
Bataryanın toplam enerji kapasitesidir
Örn: 1500 mAh = 1.5 Amper/saat kapasite
Kapasite arttıkça uçuş süresi uzar ama batarya ağırlaşır
3. C Değeri (Deşarj Oranı)
Ne kadar akımı güvenli şekilde sağlayabileceğini gösterir
Örn: 1500mAh 100C batarya = 150A anlık çıkış sağlayabilir
FPV sistemlerde genellikle 50C–130C arası LiPo kullanılır
Teorik maksimum akım = Kapasite (Ah) x C değeri
🔋 LiPo ve Li-Ion Bataryalar Arasındaki Farklar
LiPo (Lityum Polimer) bataryalar FPV drone dünyasında uzun yıllardır en çok tercih edilen batarya tipidir. Bunun temel sebebi, kısa sürede çok yüksek akım sağlayabilme yetenekleridir. Bu sayede motorlara aniden yüksek güç vererek akrobatik manevralarda tam tepki sağlarlar. Bu bataryalar özellikle freestyle, racing ve yüksek performanslı uçuşlar için idealdir.
Ancak bu güç karşılığında bazı dezavantajları da vardır. LiPo’lar genellikle daha ağırdır, dış darbelere karşı hassastır ve şişmeye meyillidir. Ayrıca aşırı deşarj durumunda hücreleri kolayca zarar görebilir. Güvenli kullanımı önemlidir, çünkü delinme veya kısa devre durumunda yangın çıkarma riski vardır.
Öte yandan Li-Ion (Lityum İyon) bataryalar, özellikle son yıllarda long-range (uzun menzilli) uçuşlarda ve verimlilik odaklı projelerde öne çıkmaya başlamıştır. Bu bataryalar aynı hacimde LiPo’lara göre daha fazla kapasite (mAh) sağlar ve bu sayede uçuş süresini ciddi şekilde uzatır. Ayrıca LiPo’lara göre daha güvenlidir ve uzun vadede daha dayanıklı olabilir.
Fakat Li-Ion bataryaların anlık akım çıkışları düşüktür. Yani hızlı gaz tepkileri veya yüksek çekişli manevralar için uygun değildir. Genellikle düşük C değerine sahiptirler ve motorlara bir anda yüksek güç veremezler.
💡 Kısaca toparlamak gerekirse:
Güçlü ve patlayıcı manevralar için → LiPo
Uzun süreli, sabit uçuşlar için → Li-Ion
LiPo daha güçlüdür ama hassastır
Li-Ion daha güvenlidir ama performansı sınırlıdır
🔌 Konnektör Tipleri
Batarya uçlarında bulunan güç bağlantı konnektörleri:
XT30: Küçük dron’larda (3 inch ve altı)
XT60: En yaygın standart, 100A'ya kadar destek
XT90: Yüksek güçlü sistemler, 150A+ destek
Siyah kablo eksi (–), sarı/kırmızı kablo artı (+) ucudur.
Ayrıca her bataryada bir de balance konnektörü bulunur (genellikle JST-XH). Bu, hücrelerin dengeli şarj edilmesi için kullanılır.
🔋 Batarya Montajı
Batarya, drone gövdesine genellikle cırt kelepçe, strap ve batarya pedi ile sabitlenir
Montaj sırasında bataryanın pervanelere temas etmeyecek şekilde yerleştirildiğinden emin olunmalı
Ani manevralarda kaymaması için ekstra kaydırmaz yüzey kullanılabilir
🔐 Güvenli Kullanım Notları
LiPo bataryalar aşırı deşarjda kalıcı hasar alır → 3.4V altına düşmemelidir
Şarj sırasında mutlaka özel LiPo şarj cihazı kullanılmalı
Uçuş sonrası bataryayı hemen soğumaya bırak, şişmiş bataryaları ASLA kullanma
Bataryayı yangın güvenli çanta veya LiPo saklama torbasında taşı / sakla
🧮 Örnek: 6S 1500mAh 100C Batarya Ne Sağlar?
Toplam voltaj: 22.2V
Kapasite: 1.5Ah
Max. çıkış akımı: 150A
Uygun kullanım: 5 inch freestyle veya yarış FPV dron’ları
Uçuş süresi: 3–6 dakika arası (stil ve yapıma bağlı)
🔚 Sonuç
Batarya, FPV sistemin kalbidir. Gücün nereden, nasıl ve ne kadar geldiğini belirler.
Voltaj (S), kapasite (mAh) ve C değeri dengeli olmalıdır
Doğru konnektör ve güvenli montaj hayat kurtarır
LiPo’lar güçlüdür ama dikkat ister; her zaman koruyucu önlem al
GPS Modülü
FPV dron’larda kullanılan GPS modülleri, uçağın konumunu ve hızını tespit etmek için uydu sinyallerini kullanır. Görsel uçuşun ötesine geçmek isteyen, sistemini otonomiye yaklaştıran ya da sadece “dron’um kaybolursa bulayım” diyen herkes için önemli bir parçadır.
📡 Ne İşe Yarar?
Konum takibi: Dron’un anlık enlem ve boylam koordinatlarını verir
Yükseklik ve hız verisi: Barometrik veya GPS tabanlı yükseklik, yatay hız ve tırmanma/iniş hızını sağlar
Return to Home (RTH): Dron’un kalkış yaptığı noktaya otomatik dönmesini sağlar
Otonom görevler: GPS waypoint’leri ile rota çizilmesine olanak tanır
OSD verisi: Ekranda uçuş hızı, yükseklik, yön gibi bilgiler görünür
🛰️ Uydular ve GNSS Sistemleri
Modern GPS modülleri genellikle birden fazla küresel uydu sistemini destekler:
GPS (ABD)
GLONASS (Rusya)
GALILEO (AB)
BeiDou (Çin)
Ne kadar çok sistem desteklenirse, sinyal alım süresi o kadar kısalır ve konum doğruluğu artar. 6’dan fazla uyduya bağlanmak genellikle sağlıklı veri almak için yeterlidir.
🔍 M8, M9, M10 Serileri Ne Anlama Geliyor?
🔹 M8 Serisi (Neo-M8N, M8Q vb.)
Eski ama hâlâ yaygın kullanılan seri
Genelde GPS + GLONASS destekler
Uydulara kilitlenmesi yavaştır (~30–60 saniye)
Uygun fiyatlıdır
FPV’de giriş seviyesi INAV/Ardupilot sistemlerinde sıkça kullanılır
🔹 M9 Serisi (Neo-M9N)
Daha güncel, çok sistem destekleyen yongadır
GPS, GLONASS, Galileo ve BeiDou'yu aynı anda kullanabilir
Çok daha hızlı uydu bulur (~5–15 saniye)
Daha kararlı ve hassas konum verir
Genelde 25Hz'e kadar GNSS çözüm oranı sağlar
Uçuş güvenliği açısından M8’e göre belirgin avantaj sunar
🔹 M10 Serisi (Neo-M10, M10050-KA gibi)
u-blox’un en yeni nesli
Tüm GNSS sistemlerini (GPS, GLONASS, Galileo, BeiDou, QZSS, SBAS) aynı anda destekler
Multi-band (L1+L5) desteği ile çok daha hassas konum verir
Uydulara bağlanma hızı çok yüksektir (<5 saniye)
Özellikle yüksek irtifa ve hızda daha stabil konumlama sağlar
FPV’de “en üst seviye GPS” sınıfına girer
🎯 Ne Seçilmeli?
Hobi uçuşları ve hafif GPS ihtiyaçları için M8 yeterlidir
INAV/Ardupilot + otonom görevler için M9 ciddi bir kalite artışı sunar
Gelişmiş otonomi, hızlı fix, yüksek hassasiyet isteyenler için M10 tavsiye edilir
🛠️ Yapı ve Bağlantı
Bir GPS modülü genellikle şu bileşenleri içerir:
GPS çipi: Sinyalleri işler
Seramik anten: Uydu sinyallerini alır
LED göstergeler: Bağlantı durumu hakkında bilgi verir
Compass (manyetometre – opsiyonel): Yön tayini sağlar (genellikle INAV ve ArduPilot sistemlerinde önemlidir)
🔌 Bağlantı genellikle UART üzerinden yapılır. 4 kabloyla bağlanır:
TX: Veri gönderimi
RX: Veri alımı
5V: Güç
GND: Toprak
Eğer GPS modülünde manyetometre varsa, ilave olarak I2C (SCL/SDA) hattı da bağlanmalıdır.
🧭 Manyetometreli GPS Ne Sağlar?
Manyetometreli GPS (compass entegreli), özellikle sabit kanatlı veya otonom görev uçuşlarında yön bilgisini sağlar. Betaflight gibi manuel sistemlerde genellikle kullanılmaz. Ancak INAV ve ArduPilot’ta:
Heading (baş yönü)
Yön sabitleme
Yönelimli RTH
gibi özellikler için şarttır.
🔍 GPS Verilerinin Görüntülenmesi
OSD üzerinden anlık hız, yükseklik, koordinatlar, RTH yönü ve mesafe gibi bilgiler FPV gözlüğünde görülebilir
Telemetri destekli sistemlerde bu veriler yer istasyonuna veya mobil uygulamalara da aktarılabilir (örneğin Mission Planner)
⚙️ Montaj Tavsiyeleri
GPS modülü mümkünse drone üzerindeki diğer elektronik bileşenlerden uzak ve üst tarafa yerleştirilmelidir
Manyetometreli GPS'lerde, motorlardan gelen manyetik parazit yön sapmalarına neden olabilir → bu yüzden genellikle uzun bir direkle yükseltilerek monte edilir
Mümkünse metal yüzeylere doğrudan temas etmemelidir
⚠️ Dikkat Edilmesi Gerekenler
GPS modülünün doğru çalışması için açık gökyüzü gerekir – binalar, ağaçlar ve özellikle karbon fiber gövdeler sinyali kesebilir
Uçuş öncesi “GPS Fix” (uyduya bağlanma) işlemi tamamlanmadan kalkış yapılmamalı
Uydulara bağlanma ilk başta 30–90 saniye sürebilir, bu normaldir
🔚 Sonuç
GPS modülü, FPV dünyasında sadece uzun mesafe için değil, güvenli dönüş, otonom görevler ve uçuş verileri için de kritik öneme sahiptir.
INAV ve ArduPilot gibi sistemlerde olmazsa olmaz
Betaflight gibi manuel sistemlerde ise “kaybolmaya karşı sigorta” gibidir
Doğru montaj ve sistemle uyumlu bağlantı yapıldığında uçuş emniyeti ciddi ölçüde artar
YARDIMCI EKİPMANLAR
Transmitter (Kumanda)
Transmitter, pilotun fiziksel hareketlerini (örneğin stick hareketlerini) sinyale çeviren ve bu sinyali alıcıya (RX) gönderen cihazdır. Ne kadar kaliteli bir kumandanız varsa, o kadar iyi sinyal kalitesi, düşük gecikme ve güvenli bağlantı elde edersiniz.
🧩 Temel Görevleri
Throttle, yaw, pitch ve roll gibi temel uçuş komutlarını iletmek
Uçuş modları, arming switch, buzzer, RTH gibi fonksiyonları tanımlamak
Drone üzerinde konfigüre edilen özel görevleri tetiklemek
Bazı sistemlerde (Crossfire, ELRS) telemetri verisi de geri alınabilir
📶 Çalışma Prensibi
Kumanda belirli bir frekans bandında ve protokolde sinyal gönderir. Dron’daki alıcı (RX), bu sinyali alarak flight controller’a iletir. Kumanda ve alıcı, bind işlemiyle eşleştirilmiştir ve aynı protokolü kullanmak zorundadırlar.
🔁 Yaygın Frekanslar
2.4 GHz: En yaygın frekans, düşük gecikme – orta menzil
900 MHz / 868 MHz: Uzun menzil – düşük frekans, daha iyi penetrasyon
433 MHz, 1.3 GHz vb.: Nadir, uzun menzilli özel sistemlerde
Düşük frekans → Daha uzun menzil ama daha yavaş tepki
Yüksek frekans → Daha hızlı tepki ama daha kısa menzil
🔐 Yaygın Protokoller
Kumanda ve alıcı arasında kullanılan protokoller, performansı ve uyumluluğu belirler:
FrSky (ACCST, ACCESS): Ucuz ve yaygın, ama artık pek tercih edilmiyor
FlySky / iBUS: Giriş seviyesi sistemlerde
TBS Crossfire (CRSF): Uzun menzilli, düşük gecikmeli sistem
ExpressLRS (ELRS): Açık kaynak, ultra düşük gecikme ve uzun menzil – günümüzde çok popüler
Futaba, DSMX: Marka özel sistemler
🧠 Kumanda Tipleri
1. All-in-One Kumandalar
Dahili RF modül içerir
Genelde ELRS veya FrSky entegredir
Kolay taşınabilir, kompakt
Örnek: Radiomaster Zorro, Jumper T-Pro, BetaFPV LiteRadio
2. Modüler Kumandalar
Arka kısmına harici modül (ELRS, Crossfire) takılabilir
Genelde çok protokollü ve yüksek kaliteli
Örnek: Radiomaster TX16S, Jumper T18, TBS Mambo
🔄 Stick ve Switch Yapılandırmaları
Kumandalar genelde Mode 2 düzeninde kullanılır:
Sol stick: throttle (gaz) + yaw (sağa/sola dönüş)
Sağ stick: pitch (ileri/geri) + roll (yana eğim)
Ayrıca:
2–6 konumlu switch’ler uçuş modu, arming, RTH gibi işlevler için atanabilir
Dials ve sliders gibi ek kontroller özel görevlerde kullanılabilir
🧩 Modül Yuvası (JR / Lite Bay)
Kimi kumandaların arka tarafında modül takılabilir yuva bulunur:
JR Bay: TBS Crossfire, ELRS gibi büyük modüller takılır
Lite Bay: Daha küçük boyutlu modüller (ELRS micro modül gibi) için
Bu sayede kumanda ELRS, Crossfire veya diğer sistemlere kolayca uyarlanabilir
📲 Konfigürasyon ve Yazılım
Çoğu modern transmitter, OpenTX veya EdgeTX isimli açık kaynak yazılımlar kullanır.
Bu sistemler:
Model profilleri oluşturmanı
Mix ayarları yapmanı
Stick hassasiyeti ve limitlerini ayarlamanı
Telemetri verilerini ekran üzerinden takip etmeni sağlar
EdgeTX, OpenTX’in daha modern ve hızlı arayüze sahip versiyonudur – çoğu yeni kumanda bunu tercih eder.
🔋 Güç Kaynağı
Kumandalar genellikle 2S Li-ion batarya, 18650 hücreler veya 2S LiPo ile çalışır.
Bazılarında dahili şarj devresi vardır
Şarj portu genellikle USB-C veya micro USB’dir
🛡️ Güvenli Kullanım
Bind işleminden sonra fail-safe ayarlarının doğru yapıldığından emin ol
Güncellemeleri takip et, firmware uyumsuzlukları sinyal kesintisine yol açabilir
Uzun uçuşlarda yedek batarya veya power bank bulundurmak akıllıca olur
🔚 Sonuç
Transmitter, FPV sisteminin kalbidir çünkü doğrudan seninle drone arasında bir bağ kurar.
ELRS gibi modern sistemler düşük gecikme + uzun menzil sunar
Modüler sistemler daha esnektir ama biraz daha büyük olur
EdgeTX/OpenTX gibi yazılımlar sayesinde esnek kontrol yapıları oluşturulabilir
Uyumlu alıcı + doğru frekans kombinasyonu = kesintisiz uçuş keyfi
FPV Gözlükler ve VRX (Video Receiver)
FPV gözlükler, kameradan gelen görüntünün anlık olarak pilotun gözüne aktarılmasını sağlar. Bu sayede pilot, adeta dron’un içindeymiş gibi uçuş yapar. Ancak bu görüntüyü görebilmek için gözlüğün bir video alıcıya (VRX) sahip olması gerekir. Sistem ister analog, ister dijital olsun, her şey bu alıcı-verici hattında şekillenir.
📡 Görüntü Aktarımı Nasıl Olur?
Dron’daki kamera görüntüyü VTX (video transmitter) aracılığıyla gönderir
Yerdeki gözlük veya monitör üzerindeki VRX bu görüntüyü alır
Gözlüğün ekranında bu görüntü anlık olarak gösterilir
Bu zincirdeki her bir parça, uçuşun netliğini ve güvenliğini doğrudan etkiler.
🎨 Analog vs. Dijital FPV Gözlükler
🔸 Analog Sistem
5.8 GHz frekansında çalışan VTX/VRX ile görüntü aktarılır
Gecikme düşüktür (~20 ms civarı), anlık tepki isteyen yarışçılar için idealdir
Görüntü genellikle bulanıktır, sinyal zayıfladıkça karıncalanma olur
Sistemin maliyeti düşüktür, parçaları kolay bulunur
Modüler gözlüklerde harici VRX modülü ile genişletilebilir
Örnek: FatShark Dominator HDO2 + RapidFire VRX, Skyzone SKY04X
🔹 Dijital Sistem
Görüntü dijital olarak sıkıştırılarak gönderilir
Genellikle 5.8 GHz’de ama farklı protokollerle çalışır
Görüntü kalitesi çok yüksektir (HD), ancak biraz gecikme olabilir (~30–50 ms)
Parazit olduğunda görüntü karıncalanmaz; doğrudan donar ya da piksellenir
VTX, gözlük ve VRX aynı dijital protokolde olmalıdır
Popüler dijital sistemler:
DJI Digital FPV
HDZero
Walksnail (Avatar)
🔌 VRX (Video Receiver Module)
📥 Ne İşe Yarar?
VRX modülü, dron’daki VTX’in gönderdiği görüntüyü alır.
Analog gözlüklerde genellikle modüler yapıdadır, yani değiştirilebilir
Dijital sistemlerde VRX ya gözlüğün içine gömülüdür (örneğin DJI Goggles), ya da harici bağlanabilir (HDZero VRX gibi)
🔀 Analog VRX Özellikleri
Kanal Tarayıcı: Frekanslar arasında otomatik geçiş yapar
Diversity (İkili Alıcı): Aynı anda iki antenle sinyal alır, en iyi görüntüyü seçer
Antena desteği: Directional (yönlü) + Omni (çok yönlü) kombinasyonu yapılabilir
Popüler VRX markaları: ImmersionRC RapidFire, TBS Fusion, Skyzone Steadyview
⚙️ Dijital VRX Yapıları
DJI Air Unit + DJI Goggles: En yaygın dijital sistem, 720p/120fps yayın yapabilir
Walksnail Avatar: DJI’a benzer yapıdadır, HD görüntü sunar
HDZero: Dijital ama analog tarzı hızlı tepki verir – özellikle yarışçılar tercih eder
Bu sistemlerin VRX modülleri ya gözlükle entegredir ya da HDMI çıkışlı harici kutular şeklindedir
🧷 Gözlük Tipleri
1. Box Gözlükler
Ucuzdur
Tek büyük ekran içerir
Genelde ağır ve büyüktür
Yeni başlayanlar için uygundur
2. Modüler Gözlükler
Küçük, kompakt yapı
İki ayrı ekran (her göz için)
VRX modülü çıkarılabilir
Anten kombinasyonu yapılabilir
Daha pahalı ama performanslı
📺 Ekran Özellikleri
Çözünürlük: 480x272 (eski) → 800x600 → 1024x768 gibi
FOV (Görüş Açısı): Ne kadar geniş görünürlük sunduğu (30°–50° arası ideal)
IPD Ayarı: İki göz arasındaki mesafeyi ayarlama
Focus / diyoptri ayarı: Gözlüğü gözlük kullanmadan net görebilme
🔋 Güç ve Bağlantı
Çoğu gözlük 2S–4S LiPo ya da 18650 batarya ile çalışır
Harici VRX modüller için ayrıca güç kablosu gerekebilir
HDMI çıkışı olan gözlüklerle harici monitör bağlantısı yapılabilir (dijital sistemler için)
🔚 Sonuç
FPV gözlük ve VRX seçimi uçuş kalitesini doğrudan etkiler.
Freestyle veya yarış yapıyorsan düşük gecikmeli analog sistem işini görür
Görüntü kalitesi senin için daha önemliyse dijital sistemlere yönel
VRX seçerken diversity özelliği, frekans aralığı ve anten uyumu mutlaka dikkate alınmalı
Batarya Şarj Aleti
FPV sistemlerinde kullanılan LiPo (Lityum-Polimer) ve Li-ion (Lityum-İyon) bataryalar oldukça yüksek enerji yoğunluğuna sahiptir. Bu bataryaların verimli, dengeli ve güvenli bir şekilde şarj edilmesi, hem dron’un sağlığı hem de pilotun güvenliği için kritik öneme sahiptir. Uçuşlar çoğu zaman havada başlar, ama bataryalar doğru şarj edilmezse yerde biter.
⚙️ Neden Özel Şarj Cihazı Gerekir?
Lityum bazlı bataryalar, aşırı şarj, dengesiz hücreler veya yanlış voltaj gibi durumlarda şişebilir, yangına yol açabilir, hatta patlayabilir. Bu nedenle FPV dünyasında akıllı şarj cihazları (smart charger) kullanılır. Bu cihazlar:
Her hücreyi ayrı ayrı takip eder
Balance şarj yapabilir
Storage voltajına çekebilir
Güvenli voltaj ve akım limitleri sunar
🔋 Temel Şarj Prensipleri
Şarj süreci genellikle 3 aşamadan oluşur:
CC (Constant Current): Hücreler nominal voltajı geçene kadar sabit akım verilir.
CV (Constant Voltage): Hücreler maksimum voltaja yaklaştığında sabit voltajda akım azaltılır.
Balancing: Tüm hücreler aynı voltaj seviyesine getirilir (balance işlemi).
Bu süreç otomatik işler. Ancak şarj cihazının doğru şekilde ayarlanması gerekir.
🧊 Storage Voltajı Nedir ve Neden Önemlidir?
Lityum bataryalar, uzun süre tam dolu (4.2 V) ya da aşırı boşalmış (3.2 V altında) şekilde bekletildiğinde kimyasal bozulmaya uğrar. Bu, bataryanın şişmesine, kapasitesinin azalmasına veya güvenlik risklerine yol açar.
Bu yüzden, bataryan 1-2 günden uzun süre kullanılmayacaksa, onu "storage voltajına" çekmen gerekir.
Storage Voltajı: Genelde 3.75V–3.85V arası
Şarj cihazında genellikle "Storage" modu bulunur. Bu mod:
Yüksek voltajdaysa → bataryayı kısmen boşaltır
Düşük voltajdaysa → hafifçe şarj eder
Hücreleri eşitler (balance)
🧯 Güvenli Saklama İçin İpuçları
Storage voltajına getirmeden bataryayı asla saklama
LiPo çantası (LiPo bag) gibi yangına dayanıklı torbalar kullan
Güneş ışığı, nem, aşırı sıcak/soğuk ortamlardan kaçın
Saklama alanında metal ile teması engelle
Şişmiş bataryaları kullanma, özel imha merkezlerine ver
📈 Şarj Akımı (Amper) Nasıl Belirlenir?
Genel kural: 1C oranında şarj etmek güvenlidir
Örn: 3000 mAh batarya → 3.0 A ile şarj
Bazı Li-ion bataryalar 2C–3C oranına kadar destekleyebilir ama bu değerler üretici datasheet'ine göre belirlenmelidir
Aşırı akım batarya ömrünü azaltır, ısı oluşturur ve şişme riskini artırır
🔌 Şarj Cihazı Türleri
Basit Tek Çıkışlı Şarj Cihazları
Genellikle tek batarya destekler
Kompakt, ucuz ve taşınabilir
Çoklu Akıllı Şarj Cihazları
Aynı anda birden fazla bataryayı bağımsız olarak şarj edebilir
Her port ayrı ayarlanabilir
Genellikle 100W–500W arası çıkış gücüne sahiptir
Paralel Şarj Panelleri (Parallel Board)
Aynı hücre sayısındaki (örneğin tümü 4S) bataryalar aynı anda şarj edilebilir
Hücre voltajlarının yakın olması hayati önem taşır
Risklidir, mutlaka dikkatli ve deneyimli kullanıcılar için önerilir
🧠 Akıllı Özellikler
Depolama modu (Storage)
Balance şarj modu
Discharge (Boşaltma) modu
Hücre voltajlarını tek tek gösterme
Buzzer ile uyarı verme
Bazı üst düzey modellerde: Bluetooth veya uygulama üzerinden kontrol
🔐 Güvenlik Kuralları (Önemli!)
Bataryayı asla gözetimsiz şarj etme
Doğru voltaj ve hücre sayısını seçmeden şarja başlama
Balance kablosunu daima bağla
Şarjdan sonra batarya aşırı sıcaksa → sorun vardır
Uzun süre saklayacaksan storage voltajını kullan
Yangın ihtimaline karşı metalden uzak, açık alanda şarj et
🔚 Sonuç
Storage voltajı: Hücre başına ~3.8V — saklamadan önce mutlaka yapılmalı
Balance şarj: Tüm hücreleri eşitler, güvenliği artırır
1C kuralı: Kapasiteye göre şarj akımı belirlenmeli
LiPo çantası ve doğru cihaz kullanımı = daha uzun batarya ömrü ve güvenli uçuş
Akıllı şarj cihazları hem verimli hem de kazasız uçuşun temelidir
Alet Çantası
Alet çantası, FPV pilotunun ilk yardım kiti gibidir. İçindeki her şey, en olmadık yerde motor kablosu kopunca, ESC yanınca ya da VTX sinyali kaybolunca hayat kurtarır. İşte, hem başlangıç hem de ileri seviye için olmazsa olmazlar:
🔧 Temel El Aletleri
İnce uçlu tornavida seti (PH0, PH00 gibi)
Vidalar genelde küçüktür, klasik tornavidalar yalama yapar.Alyan anahtarı seti
Frame’ler genelde M2–M3 civata kullanır, vidaları sökmek için şarttır.Cımbız
Dar alanlarda kablo yerleştirirken veya lehim sonrası temizlikte kullanılır.Yan keski & pense
Kablo kesmek, zip bağlarını sökmek veya lehim sonrası fazla ucu kesmek için.
🔌 Elektrik & Lehim Ekipmanları
Lehim teli (flux içeren ince tip)
Lehim makinesi (60W ve üzeri, ayarlanabilir sıcaklık tercih edilir)
Lehim emici pompa veya örgü tel → hatalı lehimi temizlemek için
Isı makaron (heat shrink) çeşitleri
Mini multimetre → bağlantı testi, voltaj ölçümü gibi işler için
Küçük fan / havalandırma (özellikle kapalı alanda lehim yaparken)
Bonus: Lehim sonrası temizlik için izopropil alkol ve pamuklu çubuklar çok işe yarar.
🔋 Batarya & Bağlantı Araçları
XT60, XT30, JST gibi konnektörler ve dişi/erkek soketler
Yedek kablo (14–18 AWG arası)
Balance kablo uzatıcılar veya dönüştürücüler
Paralel şarj paneli varsa, onun bağlantı aparatları
🪛 Montaj / Demontaj Yardımcıları
İzole bant ve çift taraflı bant (VHB önerilir)
Zip bağları (farklı boyutlarda)
Yedek cıvata ve somun seti (M2, M3, M4)
Mini vida kutusu (bölmeli kutular düzen için harika)
Mini pense veya cırcırlı lokma anahtarı (frame sıkma işlemleri için)
📺 Görüntü & Test Ekipmanları
FPV ekran (gözlük arızalanırsa görüntüyü buradan izleyebilirsin)
Yedek VRX modülü veya anten
Yedek kamera (çakma sonrası tak–çalıştır için)
USB voltaj-tester cihazı (gözlüğe gelen voltajı kontrol etmek için)
🧯 Güvenlik & Koruma
LiPo çantası (yanmaz batarya torbası)
Yangın söndürücü küçük tüp (özellikle atölye için)
Termal eldiven veya silikon mat (lehim sırasında)
Gözlük temizleme bezi ve lens temizleyici
🧠 Dijital Yardımcılar
Type-C / Micro USB kablolar → FC, ESC güncellemeleri için
Flash bellek / microSD kart (Blackbox veri kaydı için)
USB–UART dönüştürücü → FC iletişimi bozulursa, harici bağlantı için
Laptop veya mobil cihaz (Betaflight, INAV, yazılım konfigürasyonları için)
🔚 Sonuç
Alet çantası, sadece alet değil, aynı zamanda özgüven taşır. Uçuş sırasında arıza yaşadığında “tamam, ben bunu çözerim” diyebilmek için gereken her şey bu çantada durur.
FPV Drone Yazılımları
1. 🟢 Betaflight
Betaflight, FPV yarış ve freestyle uçuş için hassas kontrol, hızlı tepki ve özelleştirilebilir PID ayarları sunan, en yaygın kullanılan FPV yazılımıdır.
🔍 Özellikleri:
Yarış ve freestyle için optimize edilmiştir
Akıcı uçuş hissi, düşük gecikme
Gelişmiş PID tuning ve filtre seçenekleri
Blackbox kaydı ile uçuş analizi yapılabilir
SmartAudio/Tramp protokolü ile VTX kontrolü
GPS destekli uçuş yoktur (sınırlı GPS özellikleri)
🧠 Kimler için?
Hız, çeviklik ve anlık tepki arayan pilotlar.
Acro uçuş, bando gezisi, gap challenge gibi alanlarda en ideal tercih.
2. 🔵 INAV (Navigation-enabled)
INAV, FPV pilotlarına hem manuel hem de GPS destekli otonom uçuş imkanı sunar.
Betaflight'tan daha az agresif ama çok daha yönlüdür.
🔍 Özellikleri:
GPS destekli Return to Home (RTH), Waypoint uçuşu, Altitude Hold
Stabil uçuş modları (Angle, Horizon, Alt Hold)
Barometre, GPS, Compass ve Magnetometer gibi sensörlerle entegre çalışır
Arayüz olarak Betaflight’a benzer ama navigasyon yetenekleri çok daha gelişmiştir
🧠 Kimler için?
Kameralı sinematik uçuş yapanlar
Long range pilotlar
FPV kamikaze, gözetleme, arama-kurtarma gibi görev odaklı uçuş sistemleri
3. 🔴 ArduPilot (ArduCopter)
ArduPilot, FPV sınırlarının ötesine geçen endüstriyel ve akademik düzeyde bir yazılımdır.
Karmaşık görev planlamaları, sensör entegrasyonları, gelişmiş otonomi sağlar.
🔍 Özellikleri:
Tam otonom görev planlaması: Waypoint, survey, takip, tarama
CANBUS, Lidar, Optical Flow, companion computer gibi birçok sistemi destekler
Raspberry Pi / Jetson gibi bilgisayarla birlikte kullanılabilir (örneğin görüntü işleme)
Çoklu araç desteği: sabit kanatlı uçak, helikopter, rover, bot
MAVLink protokolü ile QGroundControl veya Mission Planner üzerinden yapılandırma yapılır
🧠 Kimler için?
Gelişmiş görev sistemi isteyenler
Kamikaze otonomi, hedef tanıma, görüntü işleme, otonom dalış vs.
Üniversite projeleri, askeri ve sivil AR-GE sistemleri
🔚Sonuç:
🟢 Betaflight: “Ben manevra yapacağım, refleksimle yarışacağım” diyorsan
🔵 INAV: “Hem manuel uçayım, hem de eve dönüşüm garanti olsun” diyorsan
🔴 ArduPilot: “Dron’um düşman tankını tanısın, kendi dalış yapsın” diyorsan
🏁 Son Söz
FPV drone dünyası, ilk bakışta sadece bir hobi gibi görünse de, derinlere indikçe bir mühendislik sanatına, bir strateji oyununa ve bir özgürlük ifadesine dönüşüyor. Bu içerikte, gökyüzüne çıkmadan önce sahip olman gereken teorik temel bilgileri, sistemin yapıtaşlarını ve her bir parçanın görevini en sade hâliyle öğrenmiş oldun.
Artık bir drone sadece “uçan bir oyuncak” değil senin için. Artık onun hangi parçayla nasıl karar verdiğini, ne zaman tepki verdiğini, nasıl kontrol edildiğini biliyorsun.
Ama bu yolun sonu değil sadece başlangıcı. Sen yeter ki “neden?” sorusunu sormaya ve çözüm üretmeye devam et.