

İLK FPV DRON’UM MRIYA’NIN MONTAJ AŞAMALARI
⚠️ Bu içerik, kendi geliştirdiğim ilk FPV drone projem MRIYA’ya ait video kayıtlarını ve kişisel notlarımı içermektedir. Burada yer alan görüntüler ve bilgiler, tamamen kendi tecrübelerim ve denemelerim sırasında edindiğim gözlemlerden oluşmaktadır.
Amacım, FPV drone meraklılarıyla bu süreçte karşılaştığım aşamaları, kullandığım donanım tercihlerini ve uygulama sırasında dikkat ettiğim noktaları paylaşmaktır. Buradaki bilgiler, profesyonel bir eğitim ya da sertifikalı bir öğretim materyali niteliğinde değildir. Yalnızca kişisel deneyimlerimi yansıtır ve her drone kullanıcısının kendi araştırmasını yaparak güvenlik önlemlerini alması tavsiye edilir.
⚠️ FPV Drone Yapımıyla İlgili Riskler
FPV drone yapım sürecinde hem elektriksel hem de mekanik riskler bulunur. Elektronik devreler üzerinde çalışırken kısa devre oluşması, bileşenlerin zarar görmesine ve kablo izolasyonlarının erimesine yol açabilir. LiPo piller yanlış şarj/deşarj, delinme veya aşırı akım çekilmesi durumunda aşırı ısınarak yangın riski oluşturabilir.
Pervaneler çalışmasa bile sert ve kesici kenarlara sahiptir; çalışır durumda ise çok yüksek devirlerde dönerek ciddi yaralanmalara sebep olabilir. Bu nedenle bakım, ayar, yazılım güncelleme veya montaj işlemleri sırasında pervaneler her zaman sökülmelidir. Böylece motorların yanlışlıkla dönmesi durumunda oluşabilecek ciddi yaralanmalar önlenmiş olur.
Lehimleme sırasında yüksek ısı, erimiş lehim sıçraması ve duman soluma gibi riskler vardır. Ayrıca kablo soyma, kesme gibi basit işlemler bile dikkatsiz yapıldığında yaralanmalara yol açabilir.
Bu nedenle FPV drone yapımı sırasında koruyucu gözlük, eldiven ve uygun havalandırma gibi güvenlik önlemleri alınmalı; çalışmalar kontrollü ve dikkatli şekilde yürütülmelidir.
⚠️ Montaja Geçmeden Önce Bilinmesi Gerekenler
Temel Teorik Bilgi: Montaja başlamadan önce, FPV dron’un temel çalışma prensipleri, kullanılan parçaların işlevleri ve birbirleriyle nasıl etkileşimde bulundukları hakkında bilgi sahibi olun.
Lehimleme Becerisi: Temiz ve güvenli lehim yapabilmek için lehimleme tekniklerine hâkim olun. Yanlış lehim, zayıf bağlantı veya kısa devreye sebep olabilir.
Doğru Araç–Gereç: Lehim istasyonu, kaliteli lehim teli, yan keski, kablo soyucu, multimetre gibi ekipmanların hazır olması gerekir.
Bileşen Kontrolü: Tüm elektronik parçaların sağlamlığını, bağlantı noktalarını ve uyumluluğunu montaj öncesinde kontrol edin.
Artık teoriden pratiğe geçiyoruz. Elimizdeki parçalar hazır, araç–gereçler yanımızda ve şimdi MRIYA’nın gövdesini adım adım inşa etmeye başlayacağız. Bu noktada, daha önce öğrendiğimiz bilgileri doğrudan uygulamaya dökeceğiz.
Montaj sürecinde, elektronik bileşenleri gövdeye yerleştirecek, bağlantılarını yapacak ve birlikte uçuşa hazır hale getireceğiz. Amacımız yalnızca parçaları birleştirmek değil; her bağlantının doğru, güvenli ve düzenli olmasını sağlamak.
Bu bölümün sonunda, kendi FPV dron’umuzun montaj sürecini baştan sona nasıl yöneteceğimizi ve olası hatalardan nasıl kaçınacağımızı öğrenmiş olacağız.
FRAME MONTAJI
Montaja “Mark4 5 inch” frame ile başlıyoruz. Bu tip frame’ler çoğunlukla herhangi bir yapım kılavuzu olmadan gelir. Yani hangi vidanın, hangi parçanın nereye oturacağını kendimiz belirlememiz gerekir. Bu noktada dikkatli inceleme ve parçaları önceden masaya yayarak düzenlemek işimizi kolaylaştırır.
Montaj sırasında alyan takımı kullanıyoruz. Alyan uçlarının vida başına tam oturduğundan emin olmak, hem montajı kolaylaştırır hem de vida başlarının yalama olmasını engeller.
⚠️ Güvenlik Notu
Frame karbon fiberden üretildiği için kenarları keskin olabilir. Montaj esnasında karbon fiber kıymıkları elimize batabilir. Bu yüzden eldiven kullanmak veya en azından montaj sırasında dikkatli olmak önemlidir. Karbon fiber tozu da solunmamalıdır; eğer kesme veya zımparalama işlemi yaparsak mutlaka maske kullanılmalıdır.
💡 Kendi Deneyimim
Montaja başlamadan önce kesinlikle tüm parçaları “dry fit” yöntemiyle — yani vidaları kullanmadan, sadece yerlerine koyarak — yerleştirmek çok faydalı oluyor. Bu yöntem sayesinde parçaların birbirine nasıl oturduğunu ve yapının genel formunu önceden anlamak mümkün oluyor. Böylece montaj sırasında yanlış vida veya parça kullanma ihtimali büyük ölçüde azalıyor.
MOTORLARIN MONTAJI
Frame’i hazırladıktan sonra motor montajına geçiyoruz. Bu projede “RCinpower 2207 2100KV” motorları kullanıyoruz. Motorlar, frame’in motor yuvalarına uygun vidalarla sabitlenir. Vidaları seçerken hem boyuna hem de diş yapısına dikkat etmemiz gerekiyor; fazla uzun vidalar motor sargılarına zarar verebilir, kısa vidalar ise motoru yeterince tutmayabilir.
Motor kablolarını frame kolunun üstünden geçirmek, hem kabloyu yere temas ve sürtünmeden korur hem de estetik olarak daha düzenli bir montaj sağlar. Bu yöntem ayrıca kablo izolasyonunun daha uzun ömürlü olmasına yardımcı olur.
Videoda görüldüğü gibi, frame kollarının uçlarında 3D yazıcıdan basılmış iniş takımları bulunuyor. Bu parçaların STL dosyalarını internette kolayca bulabilir veya kendi tasarımınızı yapabilirsiniz. 3D baskı iniş takımlarının avantajları arasında inişlerde frame kolunun uçlarını darbeden koruması, pervanelerin yere temas riskini azaltması ve drone’un yere daha dengeli oturmasını sağlaması sayılabilir.
⚠️ Güvenlik Notu
Motorlar montaj sırasında enerjisiz olmalı; ESC bağlantıları yapılmamışken monte etmek en güvenlisidir. Ayrıca karbon fiber frame kenarları bu aşamada hâlâ kesici olabileceğinden, eldiven kullanmak faydalı olur.
💡 Kendi Deneyimim
Motorları montajlamadan önce frame ve motor montaj platformu kalınlıklarını hesaplayıp, bu toplam kalınlığı geçecek en küçük vidaları kullanmak en güvenli yöntemdir. Böylece vidaların motor sargılarına zarar verme ihtimali ortadan kalkar. Ayrıca motor montajına başlarken ilk takılan iki çapraz vidayı sonuna kadar sıkmamak gerekir. Dört vida da yerine oturduktan sonra çapraz sıkma yöntemine geçmek, motorun düzgün oturmasını ve montajın sağlıklı olmasını sağlar.
ESC’YE XT-60 VE KAPASİTÖR BAĞLANTISI
⚠️ Lehimleme Öncesi Uyarı
ESC’ye XT60 ve kapasitör montajına geçmeden önce, lehimleme konusunda yeterli deneyime sahip olmak çok önemlidir. Daha önce hiç lehim yapmamış olanların veya az tecrübesi olanların, doğrudan ESC üzerinde çalışmaya başlamaları ciddi risk taşıyabilir. ESC, yüksek akım taşıyan hassas bir elektronik bileşendir ve yanlış lehimleme kalıcı hasara yol açabilir.
Bu yüzden öncelikle lehim pratiğini başka önemsiz devre kartları üzerinde veya lehim alıştırma plakaları (practice board) kullanarak yapmak tavsiye edilir. Böylece hem el alışkanlığı kazanılır hem de doğru ısı, süre ve lehim miktarını kontrol etme konusunda pratik yapılmış olur.
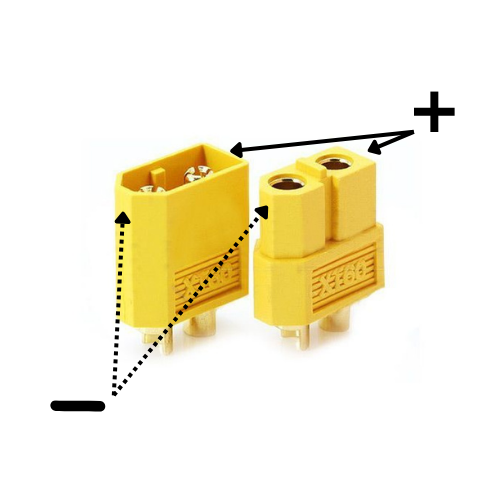
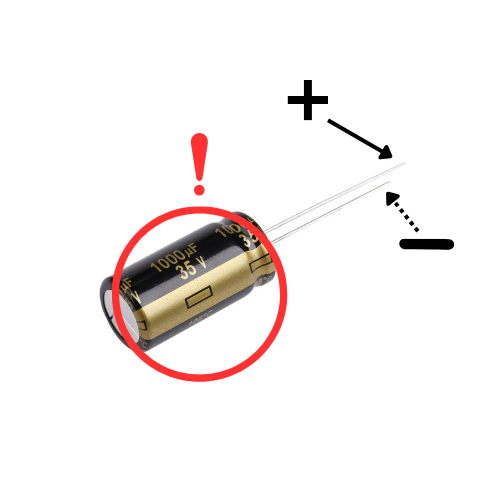
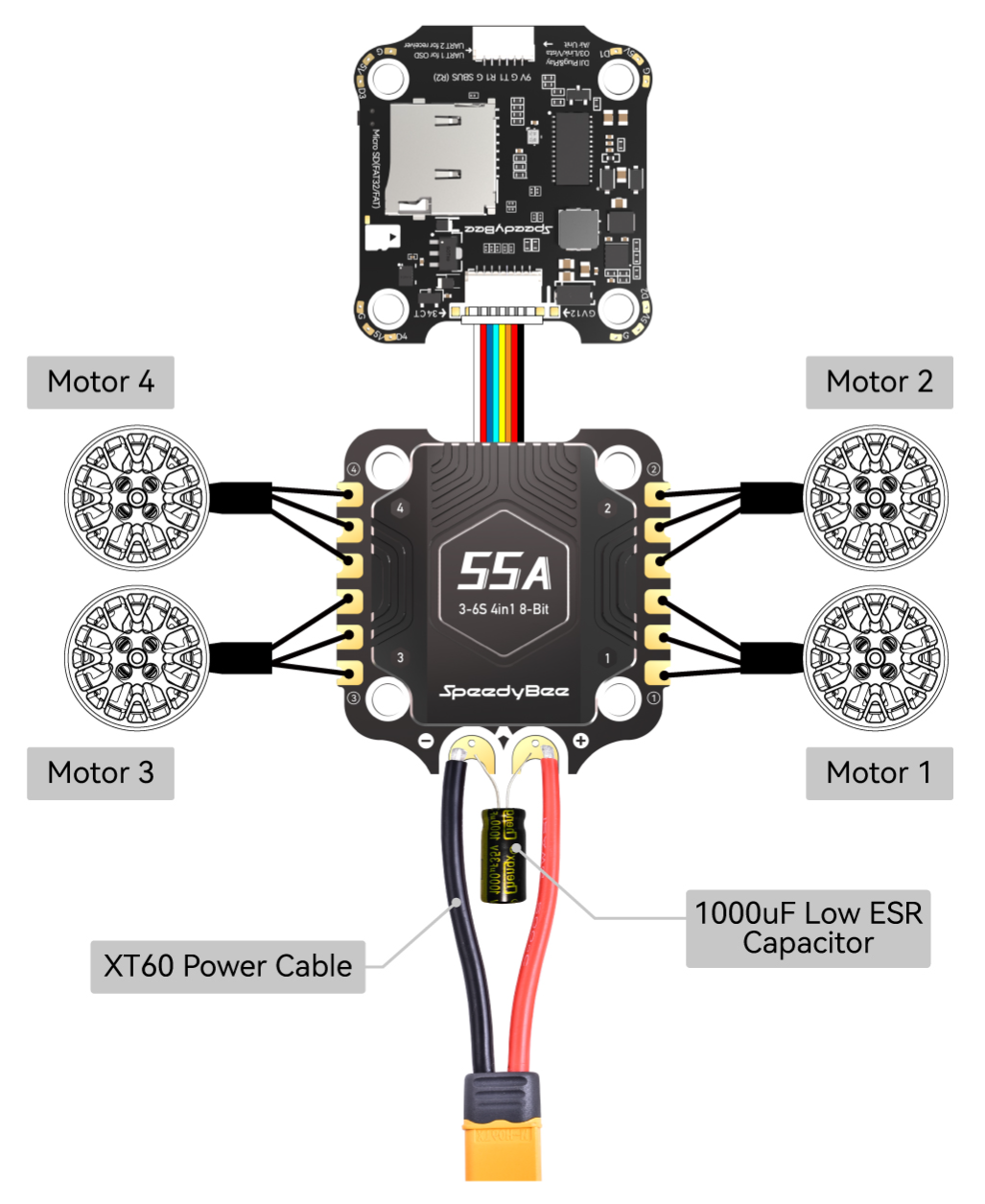
Bu aşamada ESC’ye güç girişini sağlayacak XT60 konnektörünü ve voltaj dalgalanmalarını azaltmak için kapasitörü bağlıyoruz. Öncelikle XT60 kablosunun artı (+) ve eksi (–) uçlarını doğru şekilde ayırıyoruz. Kapasitörün de kutuplarına dikkat etmemiz gerekiyor; genellikle üzerinde “–” işareti bulunan kısım eksi kutbu gösterir ve bu uç, ESC’nin eksi pad’ine lehimlenir.
Lehim yaparken havya ucunu ESC pad’i üzerinde gereğinden fazla tutmamaya özen göstermeliyiz. Fazla ısı, ESC üzerindeki pad’in zarar görmesine veya PCB katmanlarının ayrılmasına neden olabilir.
Bu montajda önce kapasitörü lehimliyoruz, ardından XT60 kablosunu takıyoruz. Ayrıca bu aşamada, ileride motor kablolarını bağlayacağımız motor pad’lerine de lehim yapıyoruz. Motor kablolarını bu adımda bağlamıyoruz; yalnızca pad’ler lehimlenerek hazır hale getiriliyor. Bu yöntem, motor montajı sırasında zamandan kazandırır ve kabloları lehimlemek için ekstra sökme işlemi gerektirmez.
⚠️ Güvenlik Notu
XT60 konnektöründe köşeli kısım artı (+), yuvarlak kısım ise eksi (–) kutbu temsil eder. XT60 kablolarında genellikle kırmızı kablo artı (+), siyah kablo eksi (–) kutbu gösterir. Kapasitörlerde kısa bacak eksi (–), uzun bacak artı (+) kutuptur. Bu kutupların yanlış bağlanması, bileşenlerin zarar görmesine veya devrenin çalışmamasına neden olabilir.
💡 Kendi Deneyimim
Bu lehimleme işlemini yaparken ESC’ye fazla flux sıçrattım ve lehimlerim istediğim gibi olmadı. Bunun sebebi, düşük kaliteli bir havya ve lehim teli kullanmamdan kaynaklanıyordu. Lehim işlerinde kaliteli bir havya, uygun çapta ve içi flux dolgulu kaliteli lehim teli ile ayrıca flux veya lehim pastası kullanmak genellikle daha iyi sonuçlar alınmasına yardımcı olabilir. Lehim sonrası ESC üzerinde kalan flux kalıntıları izopropil alkol ve yumuşak bir fırça ile temizlenebilir; bu işlem hem görüntüyü hem de bağlantıların uzun vadeli kullanımını olumlu yönde etkileyebilir.
ESC MOTOR BAĞLANTISI
Bu aşamada motor kablolarını ESC üzerindeki ilgili pad’lere lehimliyoruz. Burada dikkat etmemiz gereken en önemli konular:
Sıra ile bağlamak: Her motorun üç kablosu, ESC’nin doğru motor çıkış pad’lerine bağlanmalı. Karışıklık, motor dönüş yönlerinin hatalı olmasına sebep olabilir.
Doğru uzunlukta kesmek: Kabloları fazla uzun bırakmak gereksiz karmaşaya, fazla kısa kesmek ise gerginlikten dolayı lehim noktalarının zamanla kopmasına yol açabilir.
Sağlam lehim yapmak: Lehim bağlantıları sıkı, pürüzsüz ve tam yüzeye oturmuş olmalı.
Kablo yönlendirmesinde iki yöntem kullanılabilir:
İçerden (ESC üzerinden) dolamak: Daha temiz ve düzenli bir görünüm sağlar.
Dışardan bağlamak: Yüksek akım çeken sistemlerde hava sirkülasyonunu artırır ve ESC’nin soğutma performansını korumaya yardımcı olur.
⚠️ Güvenlik Notu
Lehimleme sırasında ESC’nin pad’lerinde fazla ısı uygulamaktan kaçının. Ayrıca motor kabloları lehimlenirken, kabloların birbirine temas etmediğinden ve lehim damlalarının başka pad’lere taşmadığından emin olun.
💡 Kendi Deneyimim
Motor kablolarını bağlarken önce kabloların nihai güzergâhını belirleyip ona göre kestim. Fazla uzun kablo, montaj sırasında düzensiz görünüme neden olurken; fazla kısa kablo, özellikle sert inişlerde lehim noktalarının zorlanmasına yol açabiliyor. Yüksek akım çeken sistemlerde kabloları dışarıdan bağlamak, ESC’nin serin çalışmasına katkı sağlayabilir.
FC'NİN ESC’YE BAĞLANMASI VE KISA DEVRE TESTİ
Bu aşamada flight controller’ı ESC’ye, aralarındaki uyumlu konnektör kablosunu kullanarak bağlıyoruz. Bu yöntem, doğrudan lehimlemeye göre hem daha pratik hem de ileride bakım veya parça değişimi gerektiğinde söküp takmayı kolaylaştırıyor.
Bağlantıdan sonra, güç vermeden önce kısa devre kontrolü yapıyoruz. Bunun için batarya ile çalışan bir short checker (kısa devre test cihazı) kullanıyoruz. XT60 konnektörüne bataryayı bağlıyoruz; short checker, devreye düşük voltaj uygulayarak ESC ve flight controller üzerinde istemeden oluşmuş lehim köprüleri veya yanlış bağlantılar olup olmadığını gösteriyor.
Eğer bağlantılar doğruysa ve herhangi bir kısa devre yoksa, cihaz üzerinden dronun başlatma sesini duyuyoruz. Videodaki gibi bu “mutlu drone sesi”, sistemin sorunsuz şekilde çalışmaya hazır olduğunu gösteriyor.
⚠️ Güvenlik Notu
Kısa devre testi, drona ilk kez tam güç vermeden önce mutlaka yapılmalıdır. Bu adım, olası bir hata nedeniyle ESC, flight controller veya diğer bileşenlerin zarar görmesini önleyebilir.
💡 Kendi Deneyimim
Short checker kullanmak, montaj sonrası sistemi ilk kez çalıştırmadan önce içimin rahat olmasını sağladı. Bu küçük cihaz sayesinde kısa devre olup olmadığını batarya bağlamadan anlayabiliyoruz, bu da özellikle hassas ve pahalı bileşenlerin korunmasına yardımcı oluyor.
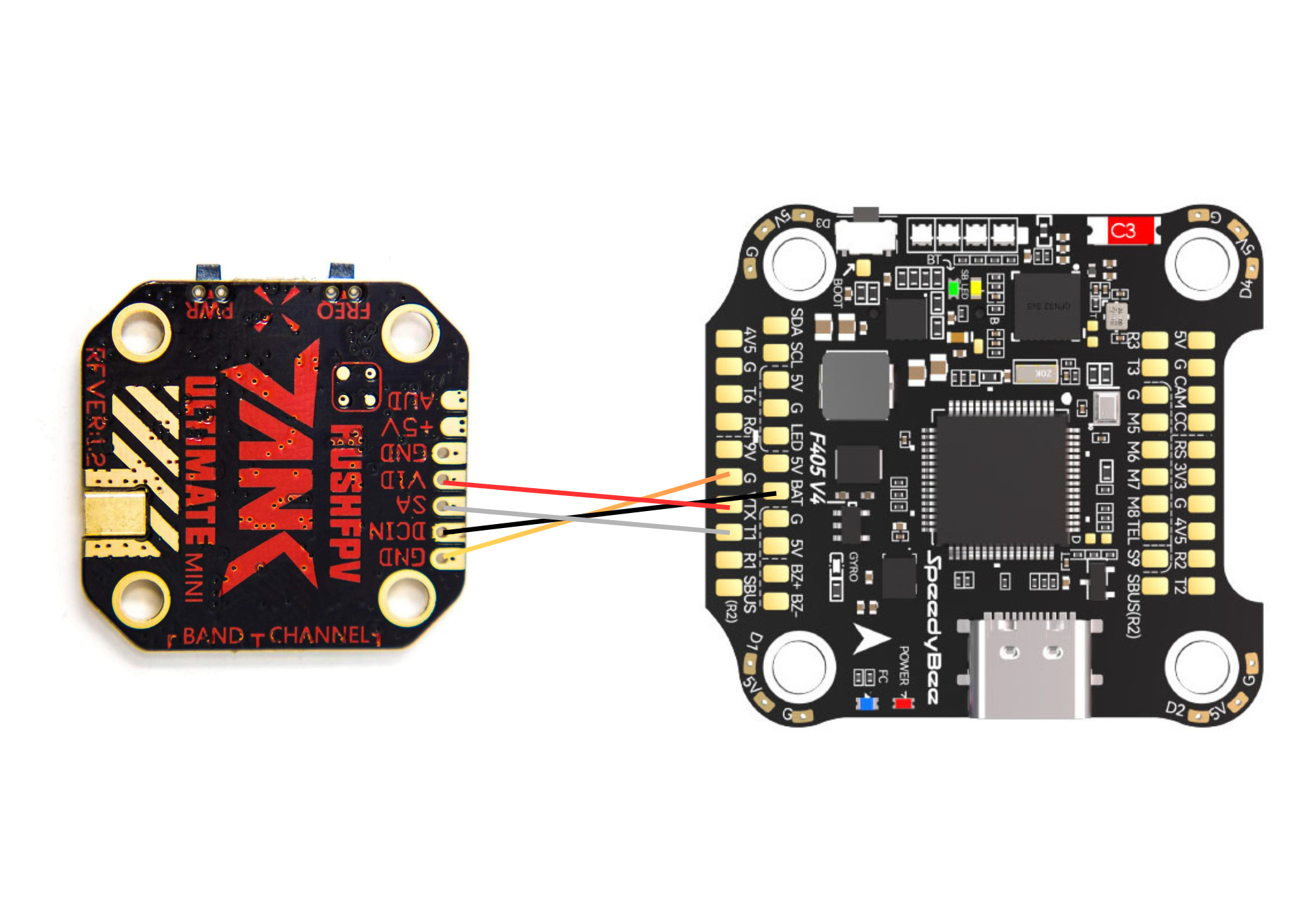
VTX BAĞLANTILARI
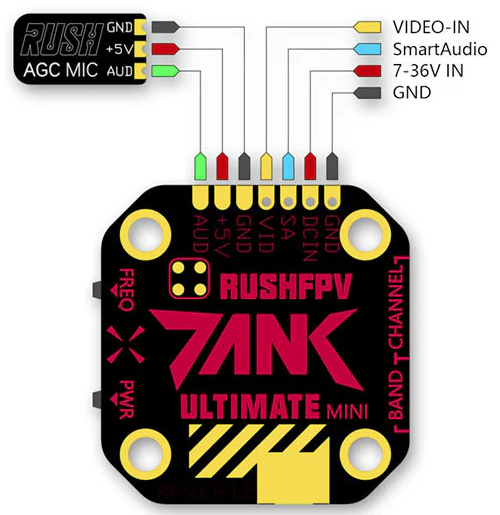
Bu aşamada görüntü aktarımını sağlayacak olan Rush Tank Mini VTX’i sisteme bağlıyoruz. VTX bağlantısında, video sinyal kablosunun flight controller’daki doğru video çıkış pad’ine bağlanması çok önemlidir. Ayrıca güç kablolarının da VTX’in desteklediği voltaja uygun pad’lere bağlanması gerekir; aksi halde VTX zarar görebilir.
Bu montajda VTX’i, yüksek güç çeken bir sistem kullandığımız ve voltaj değerleri uygun olduğu için doğrudan batarya pad’ine bağladık. Bu sayede VTX, ESC üzerinden ek voltaj regülasyonuna ihtiyaç duymadan yeterli gücü alabiliyor.
Kabloların uzunluğunu gereğinden fazla bırakmamak ve bağlantıları titreşimden uzak tutmak, hem görüntü kalitesini hem de bağlantı güvenilirliğini artırabilir. Anten bağlantısı yapılmadan VTX’e kesinlikle güç verilmemelidir; anten takılmadan çalıştırmak VTX’in aşırı ısınmasına ve yanmasına sebep olabilir.
⚠️ Güvenlik Notu
VTX üzerinde genellikle voltaj değeri belirtilir (örneğin 7–26V). Bağlantı yapılırken bu değer mutlaka kontrol edilmelidir.
💡 Kendi Deneyimim
VTX bağlantısında en çok dikkat ettiğim nokta, anteni takmadan asla güç vermemek oldu. Ayrıca kabloları mümkün olduğunca kısa ve düzenli tutmak, montaj sonrası hem daha temiz bir görüntü sağladı hem de olası kablo kopmalarının önüne geçmeme yardımcı oldu.
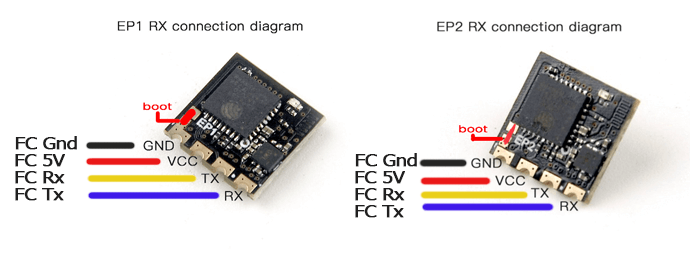
ELRS BAĞLANTILARI
Bu aşamada dron’un kumanda ile haberleşmesini sağlayacak olan Happymodel 2.4GHz EP1 ExpressLRS (ELRS) alıcıyı bağlıyoruz. Bu model, hafif yapısı ve düşük gecikmesi sayesinde FPV dronlarda sıkça tercih edilen bir alıcıdır.
Bağlantı sırasında alıcının güç (VCC), toprak (GND) ve sinyal (RX/TX) pinlerini flight controller üzerindeki ilgili pad’lere doğru şekilde lehimlememiz gerekir. Bağlantı yönünü kontrol etmek, alıcıya zarar vermemek için önemlidir.
Antenin konumlandırılması da sinyal performansında kritik rol oynar. Anteni karbon fiberden uzak, açık bir konuma yerleştirmek sinyal gücünü artırır. Anteni zip-tie ve ısıya dayanıklı makaron ile sabitlemek, hem titreşimleri hem de kablonun pervaneye temas riskini azaltır.
⚠️ Güvenlik Notu
Alıcıyı bağladıktan sonra ilk kez güç verdiğinizde, ELRS yazılımı ve kumandanızın uyumlu olduğundan emin olun. Yanlış yazılım sürümü veya protokol ayarı, bağlantı kurulamamasına neden olabilir.
💡 Kendi Deneyimim
Bu alıcıyı seçmemdeki en büyük etken, küçük boyutuna rağmen güçlü sinyal performansı sunması oldu. Montaj sırasında anteni karbon fiber frame’den uzak konumlandırmak ve sağlam şekilde sabitlemek, uçuş sırasında sinyal kaybı yaşama ihtimalini azaltıyor.
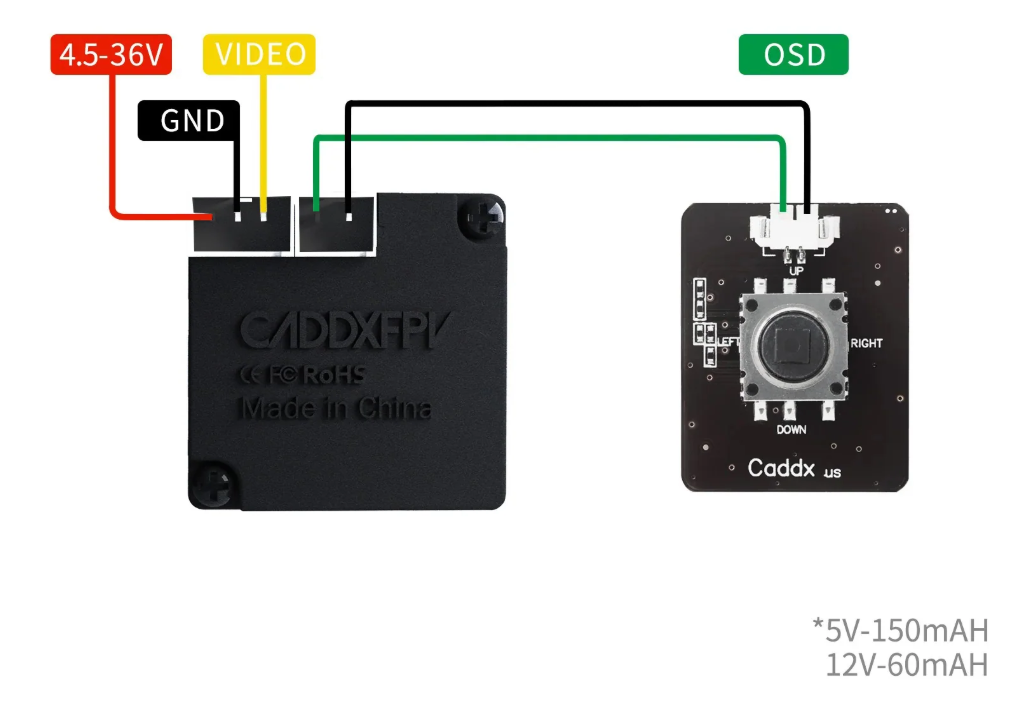
KAMERA MONTAJI VE BAĞLANTILARI
Bu aşamada dron’un görüntü almasını sağlayacak Caddx Ratel 2 FPV kamerayı monte ediyoruz. Kamera, frame’in ön kısmındaki kamera yan plakalarına vidalarla sabitlenir. Vidaların sıkılık seviyesini, kameranın açısını uçuş tarzınıza göre ayarlayabileceğiniz şekilde bırakmak faydalı olur. Yarış ve agresif uçuşlarda daha yüksek, sinematik ve yavaş uçuşlarda ise daha düşük açı tercih edilebilir.
Caddx Ratel 2 kamera bağlantılarında genellikle üç ana kablo bulunur:
Güç (VCC) – Kameranın voltaj gereksinimine uygun pad’e bağlanır.
Toprak (GND) – Güç hattının toprak bağlantısıdır.
Video (VID) – Flight controller veya doğrudan VTX’in video girişine bağlanır.
Bazı kameralarda ek olarak OSD kontrol kablosu bulunabilir; bu kabloyla kamera ayarları kumanda üzerinden değiştirilebilir.
⚠️ Güvenlik Notu
Kameranın desteklediği voltaj aralığını kontrol etmeden bağlamayın. Fazla voltaj kamerayı kalıcı olarak bozabilir. Ayrıca kamera lensini montaj sırasında koruyucu kapağıyla takmak, çizilme veya tozlanma riskini önler.
💡 Kendi Deneyimim
Kamera montajında en çok dikkat ettiğim şey, kabloyu pervanelerden uzak ve frame içinde düzenli bir güzergâhtan geçirmek oldu. Ayrıca uçuş açısına karar vermeden önce birkaç farklı pozisyonda test etmek, uçuş sırasında en iyi görüş açısını yakalamama yardımcı oldu.
SON MONTAJ
Tüm elektronik bağlantılar tamamlandıktan sonra frame’in üst plakasını takıyoruz. Üst plaka, alt kısımda monte edilmiş bileşenleri korur ve drone yapısına ek sağlamlık kazandırır. Vidaları takarken her köşeyi azar azar sıkarak ilerlemek, frame’in eşit şekilde oturmasını sağlar.
Üst plaka takıldıktan sonra bataryayı sabitlemek için strapler (batarya kayışları) monte edilir. Strapleri, batarya konumunu rahatça ayarlayabileceğiniz şekilde yerleştirmek, hem denge hem de uçuş esnasında bataryanın kaymasını önlemek açısından önemlidir.
⚠️ Güvenlik Notu
Straplerin, pervane dönüş alanına veya hareketli parçalara temas etmemesine dikkat edin. Ayrıca strapler aşırı sıkılırsa bataryanın gövdesine zarar verebilir; bu nedenle bataryayı sabit tutacak ama aşırı baskı yapmayacak şekilde ayarlanmalıdır.
💡 Kendi Deneyimim
Üst plaka montajında, önce tüm vidaları yerine yerleştirip sonrasında çapraz sıkma yöntemiyle sabitlemek, frame’in yamulmasını engelliyor. Strapleri takarken de bataryanın ağırlık merkezini ortalayacak şekilde konumlandırmak, uçuş dengesini olumlu yönde etkiliyor.
Böylece MRIYA FPV dronumuzun montaj sürecini adım adım tamamladık. Parçaların tek tek yerine oturduğunu görmek ve sonunda ortaya uçmaya hazır bir drone çıkarmak, bu sürecin en keyifli anlarından biri oldu.
Bu montaj boyunca amacımız sadece parçaları bir araya getirmek değil, her adımda neden o şekilde yaptığımızı anlamak ve ileride yapılacak bakım–onarım süreçleri için sağlam bir temel oluşturmaktı.
Unutmayın, bu drone şu an fiziksel olarak hazır olsa da Betaflight veya benzeri uçuş yazılım ayarları yapılmadan uçuşa hazır değildir. Bu içerikte yazılım ayarlarına değinmeyeceğiz; buradaki amacımız yalnızca montaj sürecini göstermekti.
FPV drone yapımı sabır, dikkat ve tecrübe gerektiren bir süreçtir. Her projede yeni şeyler öğrenmek kaçınılmazdır ve bu da işin en güzel kısmıdır. Şimdi sıra, gerekli yazılım ayarlarını tamamlayıp MRIYA’yı gökyüzüyle buluşturmada!
İyi uçuşlar! 🚀